
基于数字微镜器件的三维轮廓检测技术
VIP免费
摘 要
共焦显微镜得到的图像对比度强,具有很好的横向分辨率和极高的纵向分辨
率,很适合微-纳米器件的三维检测。然而,传统共焦显微镜的缺陷也同样明显。
如单点式的共焦扫描系统采取逐点扫描,扫描效率低下,样品的运动机械控制复
杂。采用微透镜阵列可以在完全没有机械运动机构的情况下实现并行检测,但其
制造工艺复杂,商品化程度不高,大大制约了实用性。
为此,本文对基于数字微镜器件(Digital Micromirror Device,简称 DMD)的并行
共焦检测技术进行了研究,利用 DMD 产生虚拟针孔阵列来代替传统的照明针孔,
同时使用经过了优化的并行横向扫描方式,并且通过轴向定位装置实现精确的纵
向移动,实现三维扫描控制及图像的采集。论文包括以下三个方面研究工作:
首先,选择 LED 光源替代传统的激光光源,理论分析光源对显微镜控制系统
的轴向分辨率的影响。
其次,分析层析图像处理的算法,给出层析图像处理的流程。提出了基于最
小二乘曲线拟合的轮廓提取方法,选取模板函数为二次多项式。分析并行检测系
统的理论误差及影响因素。
最后,搭建实验光路,验证 LED 光源对测量结果的影响。通过实验结果验证
LED 光源、轴向步进值和物镜数值孔径对系统测量误差的影响,符合理论误差分
析结果。对样品的高度和三维形貌进行测量,从而实现了基于 DMD 的并行共焦检
测系统的三维轮廓重建。
关键词:共焦显微镜 数字微镜器件 层析图像 三维轮廓重建
ABSTRACT
Confocal microscopy, with fine contrast ratio, high lateral resolution and excellent
axial resolution, can be applied in the dimensional measurement for micro-nano devices.
However, the deficiencies of conventional confocal microscope are quite obvious, too.
The efficiency of traditional scanning confocal microscope is rather low, together with
complex mechanical control system. the usage of micro lens array can realize a “parallel
measurement” without any mechanical structure, but its fabrication is too difficult,
which limited its availability.
Therefore, a Digital Micromirror Device(DMD) based parallel confocal
measurement was researched, where DMD took the place of the illumination pinhole in
conventional confocal microscope. Optimized lateral scanning scheme was also
introduced into the measurement, together with precise axial location device, scanning
control and image capture were realized. There are three sections in this paper:
First of all, we take LED place of the traditional laser light, analyze the impact on
the axial resolution of the microscope control system in different light source in theory.
Secondly, we analyze the algorithms for processing the section image, give the
process for section image. we give the contour extraction method which is based on the
least squares approximation and select the quadratic polynomial as the template
function. analysis on the theoretical error and the influencing factors of the confocal
optical system.
At last, We set up the optical path, analysis the impact in the different light source.
We get the different impact on the measurement error in the different parameters such as
LED light, axial step and NA. It consistents with theoretical error. We get the height and
the three dimensional contour of the micro-nano sample. Thus, we can achieve the
3D-image reconstruction for the DMD-based parallel confocal measurement system.
Key Words: Confocal microscope, Digital micromirror device,
Section image, 3D-image reconstruction
目 录
中文摘要
ABSTRACT
第一章 绪 论............................................................................................................1
§1.1 三维轮廓检测技术的研究背景................................................................1
§1.2 共焦显微镜的发展历史.............................................................................2
§1.3 课题来源研究目的与意义.........................................................................5
§1.4 论文结构....................................................................................................6
第二章 数字微镜器件..............................................................................................8
§2.1 DMD 历史发展......................................................................................... 8
§2.2 DMD 的基本结构..................................................................................... 9
§2.3 DMD 芯片的工作原理........................................................................... 11
§2.3.1 DMD 的微镜偏转原理................................................................... 11
§2.3.2 DMD 的光开光特性....................................................................... 11
§2.4 DMD 芯片的特点................................................................................... 13
§2.5 DMD 在共焦检查系统中的 Z字形扫描...............................................15
§2.6 本章小结..................................................................................................16
第三章 基于 DMD 的共三维轮廓测量系统........................................................ 17
§3.1 典型的并行共焦检测系统......................................................................17
§3.2 并行共焦检测系统的特性......................................................................17
§3.2.1 横向分辨率.......................................................................................17
§3.2.2 轴向分辨率......................................................................................18
§3.3 基于 DMD 的扫描控制系统.................................................................. 20
§3.3.1 基于 DMD 的多点并行扫描共焦系统总体方案.......................... 20
§3.3.2 基于 DMD 的共焦扫描系统控制流程.......................................... 21
§3.4 基于 DMD 的光路成像模块.................................................................. 22
§3.4.1 光源的改进及其对分辨率的影响..................................................22
§3.4.2 物镜的选择......................................................................................22
§3.5 轴向定位控制模块..................................................................................23
§3.6 基于 DMD 的层析图像采集模块.......................................................... 25
§3.7 本章小结..................................................................................................26
第四章 共焦三维轮廓测量的算法分析................................................................28
§4.1 层析图像的滤波处理..............................................................................28
§4.1.1 局部平均法......................................................................................28
§4.1.2 中值滤波..........................................................................................29
§4.1.3 试验结果和分析..............................................................................30
§4.2 层析图像有效点的选取..........................................................................31
§4.3 层析图像二值化......................................................................................32
§4.3.1 Otsu 算法......................................................................................... 32
§4.3.2 Bernsen 算法................................................................................... 33
§4.3.3 试验结果和分析..............................................................................33
§4.4 图像三维轮廓提取方法 ........................................................................35
§4.4.1 极值搜索法 ....................................................................................35
§4.4.2 最小二乘曲线拟合法......................................................................36
§4.5 曲线拟合法的理论误差分析 ................................................................39
§4.6 本章小结..................................................................................................42
第五章 实验结果及分析........................................................................................43
§5.1 高功率 LED 光源的深度响应曲线实验..................................................43
§5.2 误差结果分析..........................................................................................45
§5.3 样品三维轮廓的高度测量实验..............................................................47
§5.4 本章小结..................................................................................................48
第六章 总结与展望................................................................................................49
§6.1 本文总结...................................................................................................49
§6.2 需要改进的工作......................................................................................49
参考文献..................................................................................................................50
在读期间公开发表的论文和承担科研项目及取得成果......................................53
致谢..........................................................................................................................54

第一章 绪论
1
第一章 绪论
§1.1 三维轮廓检测技术的研究背景
随着计算机技术和现代制造技术的快速发展,特别是微机械、微电路、微光
学元件等各种微纳米结构零件的出现,对各个零件的尺寸精度要求越来越高,相
应的对这些制件的三维轮廓测量通常都需要测量仪器显微放大,这些测量仪器通
常需要很高的横向及纵向分辨率,因此,三维表面轮廓测量作为一项重要的新兴
技术,已经成为国内外精密测量方法的研究热点。
一般来说表面轮廓测量分为两大类[1],一种是接触式测量,接触式测量就是指
测量装置直接接触被测物的表面,能直观的反映测量物的信息。接触式测量主要
有机械式触针法 [2,3]、比较法[4]、印模法[5]等,这种测量方法适合那些不易划伤、
刚性强度低的物体,具有很大的局限性,测量精度低。另一种是非接触式测量,
就是测量装置与被测物表面无直接接触,这种方法的优点就是测量装置对物体表
面轮廓没有直接影响,避免了由于与测量装置相接触而带来的系统误差。
目前非接触式测量有很多方法,如:光学传感器法(三角法)[6]、光切法[7]、
光外差干涉法(莫尔等高法)
[8]、干涉计量法[9~11]、共焦显微法[12,13]、近场光学法[14]
等。其中三角法、光切法和光外差干涉法是以光学投影为基础的,均具有信息处
理计算复杂且适用性差的缺点。三角测量的原理是用非接触激光光学探头替代接
触式探头,从而获得表面宏观轮廓信息,克服了接触式测量的缺陷,提高测量的
范围。干涉计量法[15]可分为双光路和共光路两种类型。WYKO 公司生产的 TOPO
轮廓仪是分光路干涉轮廓测量仪的典型代表,共光路干涉轮廓测量仪按其干涉原
理可分为微分干涉(Nomarski )、差动干涉及外差干涉三种类型。干涉计量法具有高
位相分辨率、高空间分辨率和高测量精度的特点,这种方法是以波长为基础,适
用于检测有微小起伏的面形,但抗干扰能力差,而且纵向测量范围在波长量级,
测量范围偏小。光探针式测量法分为共焦显微镜和离焦误差检测,属于非接触式
测量,测量方法与机械式触针法类似,只是用聚集光束代替机械探针。近场光学
是一门涉及了光谱学、光学和扫描探针显微学等多个学科交叉科学,它将光谱观
察的尺度拓展到纳米区域。扫描探针显微镜法(SPM,
Scanning Probe Microscope)
拥有极高的横向及纵向分辨率,是应用最广泛的表面轮廓测量方法。原子力显微
镜(AFM,Atom force Microsoft)和扫描力显微镜(SFM,Scanning Force Microscope)
是两种最为常用的扫描探针显微镜,为了对以上各种轮廓测量方法有更详尽的了
解,表1-1 给出了目前几种常见微观轮廓测量方法的技术参数及特点。

基于数字微镜器件的三维轮廓检测技术
2
表1-1 微观轮廓测量方法的技术参数与特点
方法
原理
纵向分辨率
横向分辨率
特点
光探
针测
量
共焦显微镜
10 nm
0.35 µm
横向和纵向分辨率高;有效抑制
散射光;分辨率受针孔尺寸限制
离焦
误差
探测
像散
1nm
纵向分辨率高;稳定;线性范围
小
临界角
1nm
0.65 µm
分辨率高;稳定性好;线性范围
偏小;调整困难
傅科刀口法
1nm
1µm
纵向分辨率高;线性范围小;测
量倾角小
干涉
测量
双光
路
TOPO
0.1 nm
0.35µm
分辨率高;无需机械扫描;但对
外部干扰敏感
共光
路
微分干涉
0.1 nm
1µm
分辨率高;无需机械扫描;对外
部干扰敏感;测量结果受表面倾
角和棱镜位置影响
外差干涉
0.39 nm
0.73 µm
分辨率高;对外部干扰敏感;非
线性误差较大
双焦
0.1 nm
1µm
对振动和外界环境不敏感;分辨
率高;但参考光条纹尺寸会引起
误差
投影
法
光学投影
300 nm
2µm
结构简单,但纵向分辨率低
散射
法
光束散射
0.6 µm
2µm
无需机械扫描;但轮廓表面随物
面统计特性而变化
SPM
法
扫描近场光学显微
镜
20 nm
20 nm
分辨率高;对探测器的质量与尺
寸有很高要求
扫描隧道显微镜
1nm
10 nm
分辨率高;测量范围小
目前几乎所有的 SFM 的测量范围都在 100µm 以内,因此不适合应用在较大范
围的图形结构及微纳米级制品表面结构的测量上,这就限制了 SFM 在微-纳米级的
三维轮廓检测中的应用。
与近场光学显微镜相比,共焦显微镜能够对样品进行 Z轴方向大范围的扫描,
而且具有良好的横向分辨率和极高的纵向分辨率,因此能够获得微-纳米结构的粗
糙表面体的三维轮廓信息。本文从共焦显微镜测量原理出发,搭建了相应的实验
光路,设计层析图像处理的流程,分析测量系统的理论误差,并设计了高度轮廓
测量和深度响应实验。
§1.2 共焦显微镜的发展历史
经过几十年的不断改进,共焦显微技术逐渐发展起来,光学显微镜的发展对

摘要:
展开>>
收起<<
摘要共焦显微镜得到的图像对比度强,具有很好的横向分辨率和极高的纵向分辨率,很适合微-纳米器件的三维检测。然而,传统共焦显微镜的缺陷也同样明显。如单点式的共焦扫描系统采取逐点扫描,扫描效率低下,样品的运动机械控制复杂。采用微透镜阵列可以在完全没有机械运动机构的情况下实现并行检测,但其制造工艺复杂,商品化程度不高,大大制约了实用性。为此,本文对基于数字微镜器件(DigitalMicromirrorDevice,简称DMD)的并行共焦检测技术进行了研究,利用DMD产生虚拟针孔阵列来代替传统的照明针孔,同时使用经过了优化的并行横向扫描方式,并且通过轴向定位装置实现精确的纵向移动,实现三维扫描控制及图像...
相关推荐
-
【拔高测试】沪教版数学五年级下册期末总复习(含答案)VIP免费
 2024-11-19 13
2024-11-19 13 -
【基础卷】小学数学五年级下册期末小升初试卷四(沪教版,含答案)VIP免费
 2024-11-19 8
2024-11-19 8 -
期中测试B卷(试题)-2021-2022学年数学五年级上册沪教版(含答案)VIP免费
 2024-11-19 8
2024-11-19 8 -
期中测试B卷(试题)- 2021-2022学年数学五年级上册 沪教版(含答案)VIP免费
 2024-11-19 10
2024-11-19 10 -
期中测试A卷(试题)-2021-2022学年数学五年级上册沪教版(含答案)VIP免费
 2024-11-19 14
2024-11-19 14 -
期中测试A卷(试题)-2021-2022学年数学五年级上册 沪教版(含答案)VIP免费
 2024-11-19 15
2024-11-19 15 -
期中测B试卷(试题)-2021-2022学年数学五年级上册 沪教版(含答案)VIP免费
 2024-11-19 11
2024-11-19 11 -
期中测A试卷(试题)-2021-2022学年数学五年级上册沪教版(含答案)VIP免费
 2024-11-19 22
2024-11-19 22 -
【七大类型简便计算狂刷题】四下数学+答案

 2025-03-18 6
2025-03-18 6 -
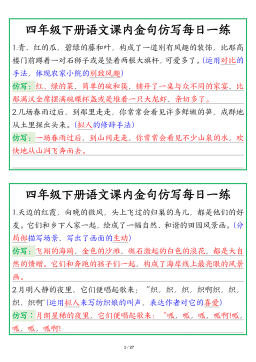
【课内金句仿写每日一练】四下语文
 2025-03-18 6
2025-03-18 6
作者:陈辉
分类:高等教育资料
价格:15积分
属性:56 页
大小:2.45MB
格式:PDF
时间:2024-11-19


相关内容
-
期中测试A卷(试题)-2021-2022学年数学五年级上册 沪教版(含答案)
分类:中小学教育资料
时间:2024-11-19
标签:无
格式:DOCX
价格:5 积分
-
期中测B试卷(试题)-2021-2022学年数学五年级上册 沪教版(含答案)
分类:中小学教育资料
时间:2024-11-19
标签:无
格式:DOCX
价格:5 积分
-
期中测A试卷(试题)-2021-2022学年数学五年级上册沪教版(含答案)
分类:中小学教育资料
时间:2024-11-19
标签:无
格式:DOCX
价格:5 积分
-
【七大类型简便计算狂刷题】四下数学+答案
分类:中小学教育资料
时间:2025-03-18
标签:数学计算;校内数学
格式:PDF
价格:1 积分
-
【课内金句仿写每日一练】四下语文
分类:中小学教育资料
时间:2025-03-18
标签:无
格式:PDF
价格:1 积分


