
汽车前轮线控转向系统研究
VIP免费
摘 要
从十九世纪末汽车诞生以来,转向系统经历了传统机械转向、液压助力转向
和电动助力转向三个重要的发展阶段。所有这些转向系统都属于机械传动,它们
的转向传动比固定,汽车转向特性随车速变化,因此汽车的操纵稳定性受到限制。
而随着人们对汽车安全性、舒适性、经济性的不断追求,出现新一代的转向系统
是必然趋势。本文所研究的汽车线控转向系统被普遍认为是下一代汽车转向系统。
该系统取消了方向盘和前轮之间的机械连接,转向传动比是通过信号传递的,其
特性设计不受机械系统结构的影响,可以随汽车速度和方向盘转角在大范围内变
化,而且可以自由设置,完全摆脱了传统转向系统的各种限制。既能提高汽车在
行驶过程中的稳定性,又不会破坏汽车的转向轻便性。同时给汽车转向特性的设
计带来无限空间,是汽车转向系统的重大革新,对于促进汽车线控技术的发展具
有重要意义。
由于线控转向系统中取消了方向盘和前轮之间的机械连接,本文将研究的重
点放在方向盘传递给驾驶员的路感和方向盘对前轮的控制上。
通过对汽车转向系统的路感进行分析,并且根据整车二自由度模型,推导出
方向盘回正力矩公式,以此作为线控转向系统的路感。使用永磁直流力矩电机作
为路感模拟器,并采用电流控制策略对路感模拟器进行控制,配合相应的硬件设
备使驾驶员能够感受到良好的路感。
考虑到汽车整车稳定性和操纵稳定性,通过汽车稳态转向理论,在横摆角速
度增益为定值的情况下提出了变传动比的公式。并将汽车的横摆角速度信号参与
到以变传动比为基础的前轮转向控制模型中,以使汽车的稳定性得到进一步的提
高。使用步进电机作为转向执行器,并采用位置控制策略对转向执行器进行控制,
再配合相应的硬件设备使驾驶员能按照驾驶意愿轻松而又安全的操纵汽车的行驶
方向。
本文还利用自行设计的电子转向控制单元和车辆动力学实时仿真软件,在不
同路况和行驶情况的虚拟环境中对所研究的基于线控转向系统的汽车进行了整车
性能仿真测试。结果表明,本文所研究的线控转向系统具有良好的回正性能和转
向特性,既可满足驾驶员对路感的需要,又能在较大程度上保证高速运行汽车的
转向安全性。
关键词:线控转向 路感 变传动比 力矩电机 步进电机
ABSTRACT
From the first automobile invented to present, the automotive steering system has
gone through three important generations, mechanical steering, hydraulic power
steering and electric power steering. Transmission ratio is a constant and the automotive
steering features change with speed. So tradition steering systems limit development of
the automotive operational stability. Along with people to car safety, comfortable,
economy of continuously pursue, studied automotive steer-by-wire system (SBW) that
the mechanical connections between the steering wheel and the front-wheel are
eliminated definitely is commonly considered as the next generation steering system.
The design property of this system is not affected by the construction of mechanical
system. So the transmission ratio of this system can not be set strict and its value can
change with speed and the hand wheel angle in large scope. Automotive SBW is
important significance for the development of x-by-wire.
Because of canceling the mechanical connections, for SBW, the road feeling and
steering control became two important contents that have to be studied.
Analyzing the automotive road feeling, the steering wheel self-aligning torque can
be estimated in terms of the planar bicycle model. We give this information to the driver.
So he gets the road condition. By controlling its current, we use the DC torque motor to
simulate the road feeling.
Considering vehicle stability, the function of changeable transmission ratio is
deduced in terms of the theory of steady steering. The angle control model of
front-wheel is built used the function of changeable transmission ratio. In this model,
yaw velocity gain that is a constant makes the vehicle stability to become better. By
controlling its situation, we use the stepping motor as the front-wheel control actuator.
By using designed ECU for turning and the Tesis DYNAware-veDYNA software,
the automotive model based SBW is tested in the virtual environment.As a result, SBW
in this paper has the good self-aligning performance and steering features. So it meets
the needs of the driver's sense of the way, also meets the automotive safety performance
at a high speed.
Key Word: Steer-by-Wire, Road Feeling, Changeable Transmission
Ratio, Torque Motor, Stepping Motor
目 录
摘 要
ABSTRACT
第一章 绪 论 ...................................................... 1
§1.1 前言 ....................................................... 1
§1.2 汽车转向系统的发展 ......................................... 2
§1.2.1 汽车转向系统的类型 ..................................... 2
§1.2.2 汽车动力转向系统 ....................................... 2
§1.3 汽车线控转向系统概述 ....................................... 4
§1.3.1 国内外线控转向系统的发展现状 ........................... 4
§1.3.2 汽车线控转向系统的意义 ................................. 6
§1.3.3 汽车线控转向系统的关键技术 ............................. 7
§1.4 本文主要研究的内容 ......................................... 7
§1.5 本章小结 ................................................... 8
第二章 线控转向系统理论基础与结构 .................................. 9
§2.1 汽车轮胎的侧偏特性 ......................................... 9
§2.1.1 汽车轮胎的坐标系与作用于轮胎上的力和力矩 ............... 9
§2.1.2 汽车轮胎的侧偏现象和侧向力-侧偏角曲线 ................. 10
§2.1.3 汽车轮胎回正力矩——绕 Oz 轴的力矩 ..................... 11
§2.2 线性二自由度汽车模型 ...................................... 12
§2.2.1 汽车坐标系 ............................................ 12
§2.2.2 线性二自由度汽车模型的存在条件 ........................ 13
§2.2.3 线性二自由度汽车动力学方程 ............................ 13
§2.3 汽车的操纵稳定性 .......................................... 15
§2.3.1 汽车操纵稳定性的基本内容以及稳态响应分析 .............. 15
§2.3.2 不同行驶工况下对操纵稳定性的要求 ...................... 16
§2.4 汽车车载总线通信 .......................................... 17
§2.4.1 CAN 总线概述 ......................................... 17
§2.4.2 TTCAN 总线概述 ....................................... 20
§2.4.3 FlexRay 总线概述 ....................................... 21
§2.5 汽车线控转向系统的结构与工作原理 .......................... 22
§2.5.1 汽车前轮线控转向系统的结构与功能 .......................22
§2.5.2 汽车前轮线控转向系统工作原理 .......................... 23
§2.6 本章小结 .................................................. 23
第三章 路感模拟与转向控制算法研究 ................................. 24
§3.1 汽车线控转向系统的路感分析 ................................ 24
§3.1.1 汽车路感分类 .......................................... 24
§3.1.2 汽车线控转向系统的路感分析 ............................ 25
§3.2 汽车线控转向系统方向盘回正力矩模型 ........................ 25
§3.2.1 轮胎产生的回正力矩 .................................... 25
§3.2.2 前轮载荷与主销产生的回正力矩 .......................... 27
§3.2.3 汽车方向盘回正力矩 .................................... 28
§3.3 线控转向系统的可变转向传动比 .............................. 31
§3.3.1 传统转向系统的转向特性 ................................ 31
§3.3.2 可变转向传动比概念 .................................... 32
§3.3.3 理想转向传动比的仿真确认 .............................. 33
§3.4 汽车线控转向系统前轮转向模型 .............................. 34
§3.4.1 汽车线控转向系统前轮转向简单模型 ...................... 34
§3.4.2 带有动态校正的汽车线控转向系统前轮转向模型 ............ 35
§3.5 本章小结 .................................................. 36
第四章 线控转向系统电机控制 ....................................... 37
§4.1 路感模拟器——永磁直流电机 ................................ 37
§4.1.1 永磁直流电机原理 ...................................... 37
§4.1.2 汽车线控转向系统对路感模拟器性能要求与电机选择 ........ 38
§4.2 方向盘回正力矩执行电机电流控制 ............................ 39
§4.2.1 PID 控制的基本理论 .................................... 39
§4.2.2 方向盘回正力矩控制系统 ................................ 42
§4.2.3 方向盘回正力矩电机仿真测试 ............................ 43
§4.3 前轮转向执行器——步进电机 ................................ 45
§4.3.1 汽车线控转向系统对转向执行电机性能的要求 .............. 45
§4.3.2 步进电机的特点与工作原理 .............................. 46
§4.4 前轮线控转向执行电机位置控制 .............................. 48
§4.4.1 步进电机控制器设计 .....................................48
§4.4.2 汽车前轮转向控制系统 .................................. 49
§4.4.3 汽车前轮转向控制系统仿真 .............................. 50
§4.5 本章小结 .................................................. 52
第五章 线控转向系统硬件设计 ....................................... 53
§5.1 汽车线控转向系统控制器介绍 ................................ 53
§5.1.1 P89LPC936 微处理器 .................................... 54
§5.1.2 CAN 通信接口电路模块 ................................. 56
§5.2 方向盘回正力矩控制部分硬件结构 ............................ 57
§5.2.1 ISC3806 系列光电编码器与角度采集模块 ...................58
§5.2.2 55LY53 永磁直流力矩电机与电机驱动模块 ................. 60
§5.2.3 电流互感器与电机电枢电流采集模块 ...................... 63
§5.3 前轮转向控制部分硬件结构 .................................. 65
§5.3.1 前轮转向执行机构 ...................................... 66
§5.3.2 42BYG1.8 系列步进电机与驱动控制电路 ................... 67
§5.3.3 滑动式电位器与位移采集电路 ............................ 70
§5.4 本章小结 .................................................. 72
第六章 基于线控转向系统的整车性能测试 ............................. 73
§6.1 Tesis DYNAware 车辆动力学实时仿真软件介绍 ..................73
§6.1.1 TD 软件特点 ........................................... 73
§6.1.2 veDYNA 车辆动力学模型介绍 ............................ 73
§6.2 线控转向系统在 veDYNA 的仿真模型 ......................... 75
§6.3 基于线控转向系统车辆动力学仿真测试 ........................ 76
§6.3.1 方向盘中间位置操纵稳定性仿真测试 ...................... 76
§6.3.2 稳态转向特性仿真测试 .................................. 78
§6.4 基于线控转向系统的车辆转向功能实验测试 .................... 79
§6.5 本章小结 .................................................. 81
第七章 结论与展望 ................................................. 82
§7.1 课题工作总结 .............................................. 82
§7.2 课题研究展望 .............................................. 82
符号表 ............................................................ 84
参考文献 .......................................................... 85
在读期间公开发表的论文和承担科研项目及取得成果 .................... 88
致 谢 ............................................................ 89

第一章 绪 论
1
第一章 绪 论
§1.1 前言
汽车在行驶过程中,经常需要改变行驶方向。汽车行驶方向的改变,是通过
一套专设的机构,使汽车转向轮(一般是前轮)相对于汽车纵轴线偏转一定的角度来
实现的。这一套用来改变或恢复汽车行驶方向的专设机构称为汽车转向系统。其
作用是使汽车在行驶过程中,能按照驾驶员的操作要求而适当的改变行驶方向,
并在受到路面传来的偶尔冲击及汽车意外地偏离行驶方向时,能与行驶系统配合
共同保持汽车操纵稳定性和安全性,它对于确保车辆的安全行驶、减少交通事故、
保护驾驶员的人身安全以及改善驾驶员的工作条件起着重要的作用。对于汽车转
向系统,除了要求其工作安全可靠、操纵轻便、机动性好、高效节能外,还要求
它能够在各种工况(包括直线行驶、正常转向、快速转向、原地转向等)下,根据不
同的行驶速度和路面状况,提供最佳的路感[1, 2]。
传统的汽车转向系统是机械系统,汽车转向运动是由驾驶员操纵方向盘,通
过转向器和一系列的杆件传递到转向车轮而实现的。20 世纪 40 年代起,为减轻驾
驶员体力负担,在机械转向系统的基础上增加了液压助力系统。从节能考虑,电
机驱动的电液助力转向系统取代了传统的发动机驱动的液压助力转向系统。近年
来,随着电子技术的发展,电子部件的应用成为转向系统发展的必然趋势,与液
压助力系统相比,以电机为动力源的电动助力转向系统除节省能源、环保外,还
通过软件修改转向助力特性,满足不同车型、不同工况以及不同驾驶员的需求,
方便快捷。以上以机械系统为基础发展起来的转向系统改变了转向系统的力的传
递特性,有效地降低了驾驶员的体力负担,提高了汽车的行驶稳定性能,但却无
法改变转向系统的角传递特性,即无法控制汽车的转向特性,更无法实现汽车转
向的主动控制。
汽车线控转向系统由于取消了方向盘和前轮之间的机械连接,完全摆脱了传
统转向系统的各种限制,是汽车转向系统的重大革新之一。线控转向系统利用软
件设定方向盘转角和前轮转向角之间的转向传动比,并通过方向盘回正力矩电机
向驾驶员反馈车辆转向信息。它能够实现转向主动控制,提供驾驶员良好的路感,
同时线控转向系统中前轮与方向盘之间没有机械连接,也给汽车空间布置带来很
大的自由[1, 3, 4]。

汽车前轮线控转向系统研究
2
§1.2 汽车转向系统的发展
§1.2.1 汽车转向系统的类型
汽车转向系统根据转向动力源的不同可分为机械转向和动力转向两大类。
1. 机械转向系统
机械转向系统以驾驶员的体力作为转向动力源。机械转向系统由转向操纵机
构、转向器和转向传动机构三大部分组成。因为采用机械的传力部件,所以可靠
性高、受外界干扰较小。但由于驾驶员自身体力的限制,机械转向系统输出的转
向力矩较小,应用范围受到限制。
2. 动力转向系统
动力转向系统(Power Steering System)是在机械转向系统的基础上增设了一套
转向加力装置所构成的转向系统,它兼用驾驶员体力和发动机动力作为转向动力
源,在低速行驶或原地不动时,转向加力装置提供较大的助力转矩,减轻驾驶员
的负担;在高速行驶时,提供较小的助力转矩或不提供助力转矩,使得驾驶员在
高速行驶时有较好的路感。
§1.2.2 汽车动力转向系统
汽车动力转向系统根据提供动力方式的不同可以分为液压助力转向系统
(Hydraulic Power Steering,简称 HPS)、电控液压助力转向系统(Electrically Hydraulic
Power Steering,简称 EHPS)、电动助力转向系统(Electric Power Steering,简称 EPS)
和线控转向系统(Steering-by-Wire,简称 SBW),其中 SBW 是未来的发展方向。
1. 液压助力转向系统和电控液压转向系统
HPS 配备转向油泵、转向控制阀、液压动力缸和液压管路,构成转向加力器,
如图 1-1(a)所示。由于 HPS 的油泵与发动机直接连接,因此即使汽车直线行驶,
没有转向时油泵也一直处在工作状态,能量损耗大。相对而言,EHPS 由一个专门

第一章 绪 论
3
的电机驱动油泵来建立液压油压力,如图 1-1(b)所示。由电子控制单元(Electronic
Control Unit,简称 ECU)控制电机的启动和停止,一般仅在需要助力转向的时候启
动电机,这样减少了机械损失,也减少了发动机燃油油耗。EHPS 虽然与 HPS 相
比有了较大的改进,也使得液压动力转向系统日趋成熟和完善,但与此同时,也
使得该系统结构更复杂、价格更昂贵,而且仍然不能克服液压动力转向系统的一
些固有缺点,如液压动力噪声大、效率低、能耗大、方向盘中间位置路感差等。
目前主要应用于高级轿车及运动型乘用车上。
2. 电动助力转向系统
EPS 是在传统的机械式转向系统的基础上,利用直流电机作为动力源,不需
要油泵,助力的大小和方向由 ECU 控制,并且只在需要的时候启动电机助力,连
液压系统和液压油也省掉了,这样安装更加方便。由于不存在漏洞问题,提高了
可靠性,且有利于环保。EPS 依据助力电机助力位置不同可分为转向轴式电动助
力转向系统(Column-EPS,简称 C-EPS)、齿轮轴式电动助力转向系统(Pinion-EPS,
简称 P-EPS)、齿条轴式电动助力转向系统(Rack-EPS,简称 R-EPS)。电动助力转
向系统一般由扭矩传感器、车速传感器、ECU、电机、离合器和减速机构等组成,
如图 1-2 所示。
当转动方向盘时,扭矩传感器测出施加于转动轴的扭矩,并产生一个电压信
号。与此同时,速度传感器测出汽车的速度,也产生一个电压信号。这两个信号
经A/D 转换后被送入控制器,经过控制器运算处理后,传送给电机一个适当的电
流以产生扭矩,经减速机构以增加扭矩,施加在转向机构上而得到一个与工况相
适应的转向作用力。该系统与液压助力转向系统相比:能显著改善汽车动态性能
和静态性能、降低能源消耗、提高行驶中驾驶员的舒适性和安全性、减少环境污
染;同时该系统结构简单、占用空间小、布置方便。此外,电动助力转向系统由
蓄电池提供动力而独立于汽车发动机,不受发动机工作的影响。一个完整的电动

汽车前轮线控转向系统研究
4
助力转向系统还应包括故障诊断与安全保护系统。当发生故障时,能停止助力,
并发出报警信号,显示所记忆的异常内容(如传感器本身异常及电机工作是否正常,
蓄电池是否正常工作等),并在出现故障后,自动恢复到手动控制转向方式。
EPS 的关键技术涉及软、硬件两个方面,硬件是其骨架,软件是其灵魂。在
硬件方面,高度可靠、价格便宜且精度又能满足要求的转矩传感器是一项关键技
术,因为在目前阶段,转矩传感器在各种 EPS 中都是必须的,它不仅要在 EPS 正
常工作时能够准确测量驾驶员施加的转矩,还要避免在 EPS 失效时因驾驶员施加
的转矩增大而损坏;另一项关键技术就是提供助力的电机,因为在不同的情况下
方向盘的转动速度相差很大,电机要能够实现助力,其转速范围也要很大,响应
快,而且在堵转时也能够提供助力作用。所以电机也是限制 EPS 在大型车辆上应
用的主要原因之一。在软件方面,要实现对助力电机的助力控制、回正控制、阻
尼控制,并实时监测转向系统的情况,当出现异常情况时采取相应的控制措施。
好的控制方法还可以实现硬件的功能,比如能够估算驾驶员输入的转矩[1]。
§1.3 汽车线控转向系统概述
§1.3.1 国内外线控转向系统的发展现状
1. 线控转向系统在国外发展情况[1, 5, 6]
汽车前轮电子转向技术的开发可以追溯到 20 世 纪 60 年代。当时德国
Kasselmann 等试图将方向盘与转向车轮之间通过导线连接,由于当时电子和控制
技术制约,此系统无法在实车上实现。随着电子技术和控制理论的飞速发展,奔
驰公司于 1990 年开始了前轮线控转向系统的研究,并将它的研究应用于概念车
F400Carving 上。随后世界各大汽车厂家和研发机构都对汽车线控转向系统做了深
入研究,但大多数还处于理论研究阶段,只有少数研发机构开发了自己的线控转
向系统,并应用于其概念车上。
第一章 绪 论
5
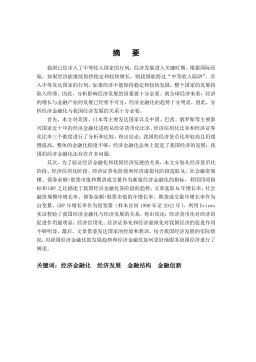
1998 年ZF 公司开发出 EPS 之后积极进行了线控转向系统的开发研究,图 1-3
为ZF 公司开发的线控转向系统。
在2001 年日内瓦国际汽车展览会上,意大利 Bertone 汽车设计开发公司推出
了概念车 FILO。FILO 采用了 Driver-by-Wire 系统,所有的驾驶动作都通过信号传
递。它使用操纵杆进行转向操作,并采用了最新的 42V 电源系统。
2002 年9月美国通用汽车公司在巴黎车展上推出了线控燃料电池车 Hy-wire。
Hy-wire 为Hydrogen 与by-wire 的合成词,意为“氢燃料驱动-线传操控”。这辆
汽车的主要核心技术就是氢动力与线控这两大技术。由于汽车的方向盘转向柱和
脚踏板被线控操控系统装置取而代之,司机既可用左手也可用右手来操控汽车的
行驶。当汽车需要转向时,司机只需转动控制装置上的手柄,传感器即会捕捉到
该动作的数字信号,并立即向电机发送一个信号,指示其带动转向齿条。在加速
时,司机只需轻柔地转动位于其左侧或右侧的手柄;在减速时,则只需握紧位于
同一手柄上的刹车制动器;手柄上下滑动即可控制方向。
2003 年日本本田公司在纽约国际车展上推出了 Lexus HPX 概念车,该车也
采用了线控转向系统,在仪表盘上集成了各种控制功能,实现车辆的自动控制。
澳大利亚昆士兰大学、美国斯坦福大学分别研究了线控转向的硬件在环试验、
主动转向控制策略以提高操纵性和安全性。SKF 的汽车分部推出了一款称为
Novanta 的新型线控汽车。
国外已有几十项线控转向专利,如:
1) 左右前轮分别用独立的执行机构控制,控制器采用多变量解耦控制,使左、
右轮的控制变量独立控制左轮转向角和右轮转向角,使之分别跟踪左轮参考转角
和右轮参考转角,可实现优化的阿克曼转向;
2) 线控转向系统的力反馈控制;
3) 冗余线控转向系统。
2. 线控转向系统在国内发展情况[1, 8]
国内在线控转向方面的研究才刚起步,吉林大学、同济大学、武汉理工大学
等对线控技术进行了一些相关研究。
同济大学利用 dSpace/Autobox 为四轮驱动电动汽车开发了线控转向试验台架
及四轮驱动、四轮转向电动汽车。2004 年同济大学在工博会上展出的“春晖三号”
电动车运用了线控转向技术,其转向器与方向盘间无机械连接。
武汉理工大学利用电磁施力器进行方向盘力反馈,设计了模糊-PID 混合控制
器,开发的线控转向系统可以实现转向随动。
吉林大学进行了变传动比、方向盘回正力矩和稳定性算法研究。

相关推荐
-
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费

 2024-10-14 48
2024-10-14 48 -
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 71
2024-10-14 71 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(原卷版)VIP免费
 2024-10-14 48
2024-10-14 48 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(解析版)VIP免费
 2024-10-14 34
2024-10-14 34 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(原卷版)VIP免费
 2024-10-14 83
2024-10-14 83 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)VIP免费
 2024-10-14 52
2024-10-14 52 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)VIP免费
 2024-10-14 53
2024-10-14 53 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)VIP免费
 2024-10-14 55
2024-10-14 55 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费
 2024-10-14 57
2024-10-14 57 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 52
2024-10-14 52
作者:赵德峰
分类:高等教育资料
价格:15积分
属性:92 页
大小:11.86MB
格式:PDF
时间:2025-01-09
作者详情
相关内容
-
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分


