
多元配气系统配气及控制
VIP免费
摘要
对现行的主要配气方法进行了比较,选择了以质量流量控制器(MFC)为控
制手段的动态配气方法作为课题配气系统的主要实现手段。
完成了全自动动态配气系统的设计。并对设计完成的配气系统进行了实际配
气测试,对最后的配比精度进行了误差分析,利用最小二乘法对实测浓度进行修
正,为 MFC 的控制电压提供更准确地设定值。并根据质量流量控制配比公式以及
不确定度计算公式,综合考虑各配气环节对配气系统不确定的贡献度,确定出配
气系统系统的不确定度简化计算公式,并根据计算公式找出了影响系统精度的主
要因素,对系统的准确评价以及为后面对 MFC 的PID 控制做出改进给出依据。
针对配气系统中核心部件 MFC 的传统 PID 闭环控制的参数不宜整定,性能差
等缺点,在研究了先进的智能算法-神经网络算法以及该算法对 PID 算法改进的几
种混合算法的基础上,提出了利用神经网络算法对 PID 算法进行改进以实现对
MFC 更优控制。利用 VB 和MATLAB 混合编程实现算法的界面设计,分别利用两
种不同的神经网络改进 PID 算法对非线性时变对象进行仿真,并对该两种神经网
络-PID 改进算法进行了比较。利用控制系统评价指标对两种改进算法进行了评价
计算。并在选择用于 MFC 进行控制的 PID 神经元网络(PID-NN)算法的基础上,针
对该算法超调量较大问题,加入动量滤波法对算法权重值修改部分进行优化并与
未改进算法仿真比较。
测试表明,设计完成的动态配气系统性能良好,满足前期的设计要求。仿真
与计算结果则表明,PID-NN 算法相对于其他两种神经网络-PID 算法,对非线性时
变对象都有着更加优秀的控制能力。该算法可以应用到 MFC 的PID 闭环控制中,
对提升 MFC 的精度和自动化程度都有着很好的价值。而改进后的 PID-NN 算法相
对于未改进算法最高有着 26.67%的超调量值减小。
关键词:配气系统 MFC 混合编程 PID 神经网络
ABSTRACT
All of the methods of gas distribution were investigated. Mass Flow
Controller(MFC) as the main method to realize gas distribution was identified.
A gas distribution system was tested.An error analysis was presented.Accroding to
mass flow formula and uncertainty calculation formula and the contribution of all
elements of the distribution system,a simplified calculation formula for uncertainty was
deduced.The primary elements which effect the precision of the distribution system
were presented from the simplified formula.
Due to classical Proportion Integration Differentiation(PID) method of MFC had
many defects.For instance, parameters are hard to set and bad performance.Kinds of
advanced intelligent algorithms to improve the PID algorithm were investigated.A
solution of taking advantage of neural network-PID hybrid algorithms to improve PID
algorithm was presented.Interface design and hybrid programming by VB and
MATLAB were completed.At the same time,a simulation of three kinds of algorithm
was carried out.A compare with these neural network-PID hybrid algorithms was
presented. An evaluation and calculation according to the evaluation index of the
control system also was presented.Then,a new momentum filtering algorithm was added
to optimize the weight values algorithm.The simulation of the improved and
unimproved algorithms were presented.
The simulation and the evaluation results indicate that PID neural network
algorithm has a more excellent control ability for nonlinear time-varying object
compared with other neural network-PID algorithms. The algorithm can be applied to
MFC‘s PID closed-loop control to improve the accuracy and automation of MFC. The
improved PID neural network algorithm has reduced 26.67% of the overshoot value
compared with the unimproved algorithm.
Key Words: Gas ditribution, MFC, Hybrid program, PID ,Neural
network
目录
中文摘要
ABSTRACT
第一章 绪论 ..................................................................................................................... 1
§1.1 课题来源,背景和意义 ................................................................................... 1
§1.2 国内外研究现状 ............................................................................................... 2
§1.2.1 配气方法和配气系统国内外发展现状 ............................................... 2
§1.2.2 热式气体质量流量测量发展现状 ....................................................... 4
§1.2.3 智能 PID 研究发展现状 ....................................................................... 5
§1.3 关键技术 ........................................................................................................... 7
§1.3.1 多元配气系统的不确定度分析 ........................................................... 7
§1.3.2 PID 算法改进 ......................................................................................... 8
§1.4 本文主要工作 ................................................................................................... 9
第二章 配气方法及配气系统设计 ............................................................................... 10
§2.1 标准混合气体的制备方法选择 .................................................................... 10
§2.2 质量流量配比法的选择 ................................................................................ 11
§2.2.1 质量流量的配比方法 ......................................................................... 11
§2.2.2 常用质量流量控制器的性能比较和选择 ......................................... 12
§2.3 配气系统 ........................................................................................................ 13
§2.3.1 测试对象 ............................................................................................. 13
§2.3.2 测试系统组成 ..................................................................................... 14
§2.4 全自动动态测试系统 ..................................................................................... 14
§2.4.1 配气管路 .............................................................................................. 15
§2.4.2 测试腔 .................................................................................................. 16
§2.4.3 测控中心 .............................................................................................. 18
第三章 配气系统测试及误差分析 ............................................................................... 19
§3.1 配气系统测试 ................................................................................................ 19
§3.1.1 项目要求 ............................................................................................. 19
§3.1.2 测试过程 ............................................................................................. 19
§3.2 系统误差计算 ................................................................................................ 22
§3.3 配气浓度的最小二乘法修正 ........................................................................ 26
§3.3.1 最小二乘法 .......................................................................................... 26
§3.3.2 线性最小二乘法修正配气浓度 .......................................................... 27
§3.4 配气系统不确定度分析 ................................................................................ 29
§3.4.1 不确定度定义 ..................................................................................... 29
§3.4.2 配气系统不确定度分析 ..................................................................... 30
第四章 气体配比的高精度控制方法及仿真 ............................................................... 33
§4.1 两种神经网络-PID 算法 ............................................................................... 33
§4.1.1 PID-NN 算法结构 ................................................................................ 33
§4.1.2 BP 神经网络 PID 算法 ........................................................................ 34
§4.2 神经网络-PID 算法的程序实现 ................................................................... 35
§4.2.1 VB 与MATLAB 的混合编程 ............................................................. 35
§4.2.2 程序结构 ............................................................................................. 36
§4.2.3 PID-NN 算法程序 ................................................................................ 38
§4.3 神经网络-PID 算法仿真与分析 ................................................................... 42
§4.3.1 非线性时变系统控制仿真 ................................................................. 42
§4.3.2 神经网络-PID 控制输出响应 ............................................................ 42
§4.3.4 系统误差 ............................................................................................. 44
§4.3.4 比例、积分、微分三参数控制 ......................................................... 45
§4.3.5 控制系统输出响应 ............................................................................. 46
§4.4 两种控制算法的性能评价 ............................................................................ 47
§4.4.1 性能评价指标 ..................................................................................... 48
§4.4.2 性能评价 ............................................................................................. 49
§4.5 PID-NN 算法改进 ........................................................................................... 51
第五章 总结 ................................................................................................................... 55
参考文献 ......................................................................................................................... 56
在读期间公开发表的论文和承担科研项目及取得成果 ............................................. 60
致 谢 ............................................................................................................................... 61

第一章 绪论
1
第一章 绪论
§1.1 课题来源,背景和意义
危险化学品贮存和运输过程中一旦发生事故,将造成巨大的生命财产损失,
并污染周边环境。为了加强危化品安全管理,我国已颁布了《危险化学品安全管
理条例》,各地相关部门也不断加强对危化品行业相关单位的监管力度。《国家中
长期科学和技术发展规划纲要》对安全问题也给予了极大的关注,明确指出“公
共安全是国家安全和社会稳定的基石。我国公共安全面临严峻挑战,对科技提出
重大战略需求”。现代安全管理的特点是采取科学技术手段,实施“科技兴安”战
略,为安全提供强有力的科学技术支撑,同时也把安全科技和产业提高到一个新
的水平。
国家 863 计划资助项目“危化品货物在途安全监测技术及系统研发与应用”
(2009AA11Z211),开发了基于 MEMS 传感器的安全监测与跟踪系统。这是一个多
传感器系统,综合应用了气体传感器、加速度传感器、倾角传感器、压力传感器、
液位传感器、开关传感器、温度传感器、湿度传感器等多种传感器,包括了危化
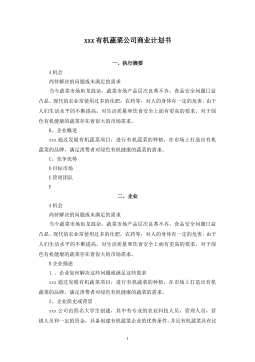
品在生产、运输、仓储和使用过程中与安全有重要关系的多种信息。图 1-1 为该多
传感器系统的测试平台研究技术路线图,整个测试平台的主要目的是为其它子课
题研发的传感器及集成产品提供测试和服务。相关设计涉及多种类型的新型
MEMS 传感器,这些新型传感器及其产品系统的性能检测对测试系统提出了多参
数、大范围、高精度、以及快速检测的要求。因此,建立相应的高性能测试平台
并研究科学高效的测试方法和评估机制,为项目中应用的多种 MEMS 传感器提供
高效的测试和可靠性评估手段,最终形成相应的行业标准,是课题顺利进行的保
障,也是本文所做工作的最终目的。
图1-1 中,线框加粗且背景加灰部分为本文的主要工作。本文主要是通过建立
一整套针对不同性质危化品气体的配气系统用于对已开发的 MEMS 传感器进行性
能测试,对建立的配气系统误差进行分析以及对该系统的不确定度给出了简化计
算公式,找出了影响系统配气精度的主要因素,并对影响配气系统精度的主要因
素,MFC 的PID 控制部分做了一些探讨和改进,通过不同的算法对多组分的配气
过程进行精度上的改进,最后对改进算法作出了比较和评价。

多元配气系统配气及控制方法研究
2
图1-1 测试平台研究技术路线图
§1.2 国内外研究现状
§1.2.1 配气方法和配气系统国内外发展现状
国内外气体传感器的测试用配气系统都经历了从封闭式到自动化和流动式的
过程。由于气体传感器的千差万别以及目标气体的多样性,所以配气方法也多种
多样。
现行的配气方法按配气方式的不同分为静态和动态配气两种。
静态配气是指将一定量的气态(或蒸汽态)的组分气体充入一定容积的配气
装置中,再充入稳定的稀释气体,混合均匀制备而成,该混合气的气体浓度由加
入的组分气和载气以及容器容积综合计算获得。现行的静态配气法主要有称量法、
分压法、静态容量法。M.J.T Milton 等[1]在传统称重法的基础上提出了一种新的数
学方法,通过该方法可以最小化连续配气时产生的不确定度。静态容量法[2]是
ISO6144 推荐使用的配气方法。根据 ISO6144 标准,国家标准物质研究中心周泽
义等[3]研制了新型标准气体静态容量法配气装置,系统精度较高,且解决了现行静
气体
传感
器测
试平
台
状态
传感
器性
能测
试平
台
电学
参数
测试
平台
环境
测试
平台
MEM
S传感
器可
靠性
评估
组建危化品监测 MEMS 传感器及系统集成产品系列测试平台
产品
与系
统性
能测
试平
台
无线模
块与卫
星通讯
模块的
测试平
台
系统
功能
安全
评估
平台
后台
信息
系统
测试
平台
测试及评估方法研究
对项目组提交样品的测试
测试分析及样品改进建议
形成测试及评估方案、标准
改进测试平台
多
批
次
测
试
第一章 绪论
3
态容量法配比常温下成液态气体时误差偏大问题。静态配气的特点是设备简单,
配气过程操作简单。但是对某些活泼性质的气体,气体配比容器与气体之间容易
发生物理吸附乃至化学反应等,使得活泼气体的测量准确度受到较大的影响。特
别是在配比较低浓度气体时,容易产生较大的配比误差,并使得配比浓度限制在
一定的范围内。所以,常用该法配制活泼性较差且用量不大的气体。
动态配气法则是将浓度已知的组分气体与稀释气体按照固定比例不断地充入
配气装置中进行混合,从而实现可以连续性配比固定浓度的所需混合气体。动态
配气特点:可以连续不断地配制所需的固定浓度的混合气体;整个混合气体的配
制和使用过程中,配制的混合气都保持着连续的流动状态;配制完成的混合气体
由于不再需要保存到固定的容器中,从而减少甚至避免了吸附或者化学反应等现
象,使得制备的混合气浓度较为稳定。此外,只需要更改组分气的浓度,即可以
在只是用同一套配气装置条件下配制不同浓度的混合气体,尤其适用于配制低浓
度混合气体。特别是随着挥发性、腐蚀性、吸附性强的危化品气体的不断使用,
此类气体的配制不适宜使用静态配气方法。早在 1960 年开始有动态配气法的相关
研究[4]出现。1978 年,美国分析仪器发展公司首先提出了利用扩散管标准气体动
态配气法配气的相关设备[5]。日本在动态配气方法研究方面也有不错的成果,上世
纪80 年代就有动态配气的相关研究[6]出现。我国虽然起步较晚,但是在上世纪 80
年代也出现过有关的研究,但是出于某些原因,最终没有取得实际应用成果。到
了90 年代,国外又研究出关于痕量有机物标准气体和水蒸气扩散管[8,9]的新型配气
方法。随着各种配气方法的出现,ISO 标准也制定了一系列的标准气体的制备方法。
其中 ISO 6145[10]就提出了使用对挥发性、吸附性和腐蚀性气体有较好配气精度的
动态配气法作为推荐方法,配气不确定度为 1%~3%,不确定度较低。
随着气体流量控制技术和气体浓度在线检测技术的发展,二十世纪末出现了
基于质量流量控制(Mass Flow Controller,MFC)的可程控的气体传感器动态配气系
统。V. Demarne 等[11]开发出基于 MFC 的动态配气系统,该系统可以最多同时进行
6组气体的配制,为气体传感器性能测试提供了高效的检测手段。其特点是可自动
配制多元混合气体,可动态控制进样时间、气体流速,可测定传感器的灵敏度、
选择性以及动态响应时间。在此基础上,有研究者在系统自动化[12]以及相关的测
试系统装置改进[12-14]方面进行了不同的工作。但是,其中很多测试系统主要是针
对固定型气体传感器设计,不能广泛地应用于不同气体传感器的测试。此外,部
分测试系统仍然需要手工配气,这使得手动配气人员无法远离危化品气体的测试
环境,需要进一步提高自动化程度。此外,对于配气系统的精度分析方面的研究
也不多,John Savodkouhi[15]通过对 MFC 的可靠性分析来提高整个配气系统的可靠

相关推荐
-
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费

 2024-10-14 44
2024-10-14 44 -
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 61
2024-10-14 61 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(原卷版)VIP免费
 2024-10-14 41
2024-10-14 41 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(解析版)VIP免费
 2024-10-14 31
2024-10-14 31 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(原卷版)VIP免费
 2024-10-14 56
2024-10-14 56 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)VIP免费
 2024-10-14 47
2024-10-14 47 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)VIP免费
 2024-10-14 44
2024-10-14 44 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)VIP免费
 2024-10-14 50
2024-10-14 50 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费
 2024-10-14 48
2024-10-14 48 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 48
2024-10-14 48
作者:高德中
分类:高等教育资料
价格:15积分
属性:63 页
大小:3.21MB
格式:PDF
时间:2025-01-09
相关内容
-
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分


