
微型无创骨折应力传感器的设计及实验研究
VIP免费
摘 要
长期以来,骨折延迟愈合与骨不连一直是临床骨科面临的难题,造成这一现
象的根本原因是缺乏对活体骨骼创伤断面应力环境的实时检测与精确控制。骨折
创伤断面的应力环境比较复杂,目前尚无有效的对骨折创伤断面的应力环境进行
无创实时检测的原理与方法,更无法对其应力环境进行实时控制。临床上手术医
生加压的不可知性和不可控性导致骨折愈合的速度及质量无法保证。
基于以上研究背景,本学位论文依托于国家自然科学基金项目“骨折愈合中
创伤断面应力环境的实时测控机理与实验研究”(编号:50975179),论文的主要
工作是设计用于骨折创伤断面应力测量的微型二维应力传感器,并进行实验研究,
论文的主要研究成果如下:
1) 对骨折愈合的生物力学机理和骨外固定器进行了阐述,总结了骨骼创伤断
面应力测量的方法,分析了骨折测力传感器的研究现状,提出了骨折创伤断面应
力的无创传感检测与控制机理,设计了骨折创伤断面应力的无创传感检测与控制
系统。
2) 根据骨折应力无创传感检测系统中对轴向拉压力和径向剪切力同时测量的
要求,设计了基于 E型圆膜片式结构的骨骼二维力传感器弹性体,建立了弹性体
的力学模型,求解了弹性体在轴向拉压力和径向剪切力作用下的应力应变解析解,
并根据叠加原理获得了合力作用下的应力应变解析解。
3) 建立了传感器弹性体有限元模型,分别分析了弹性体在轴向拉压力、径向
剪切力和合力作用下的应变变化情况,并根据有限元的求解结果,验证了理论模
型中叠加原理的正确性。将理论模型所求得的应变计算结果和有限元模型所求得
的应变计算结果进行了比较,验证了理论模型的正确性,为传感器的贴片位置和
组桥方式提供了依据。
4) 基于弹性体的理论模型,对弹性体的内外半径比和厚度这 2个主要结构尺
寸进行了优化。内外半径比的优化目标为传感器的灵敏度,厚度的优化目标为传
感器的线性度,得到了传感器的主要结构尺寸;根据理论模型和有限元模型的分
析结果,研究了应变片在弹性体上的贴片位置和组桥方式,并通过这种组桥方式
实现了对骨骼二维力传感器的解耦。
5) 研制了传感器的标定装置,标定装置可以实现对轴向拉压力和径向剪切力
的标定;在研究分析传统矩阵解耦法的基础上,提出了一种基于灰色系统理论的
传感器静态解耦方法。
6) 运用所设计的标定装置和动态应变仪对骨骼二维力传感器进行了标定,获
得了标定数据,并运用
(0,2)GM
模型对骨骼二维力传感器进行了解耦;基于标定结
果计算了骨骼二维力传感器的静态性能指标。运用有限元分析法对传感器进行了
模态分析,求出了骨骼二维力传感器的工作频率范围;运用所设计的检测与控制
系统对离体骨骼进行了实验研究,获得了预期的结果。
关键词:骨骼二维力传感器 有限元 无创传感检测 解耦
实验研究
ABSTRACT
For a long time, clinical orthopedics has been facing the problem of consolidation
tardive and nonunion; the root cause of this phenomenon is the lack of real-time
detection and accurate control over the stress environment of living skeleton injury
cross-section. As the stress environment of fracture cross-section is complex, at present
there is no effective non-invasive real-time detection principle and method for testing
the stress environment of fracture trauma cross-section, let alone real-time control of its
stress environment. Clinically, the unknowable and uncontrollable pressure that the
surgeon exerts on the bone cause the speed and quality of fracture healing can not be
guaranteed.
Based on the above background, this M. S. Dissertation relies on the Natural
Science Foundation of China project “real-time monitoring and control mechanism for
trauma section stress environment and experimental research in fracture healing”(No.:
50975179). The main work of this paper is the design of a micro two-dimensional stress
sensor which used for stress measurement on the fracture trauma section, and to conduct
experimental research including bone trauma section stress test and control mechanism
research. The major research achievements of this dissertation are as follows:
1) Biomechanics mechanism of fracture healing and bone external fixation are
described in this paper, summarizes the bone trauma section stress measurement method,
analyzes the research status of fracture strain sensor, non-invasive sensing detection and
control mechanism for the stress of bone trauma section has been proposed,
non-invasive sensing detection and control system of bone stress has been designed.
2) According to the requirements that the fracture stress non-invasive sensing
detection system needs to achieve the simultaneous measurement of the axial pull
pressure and radial shear force, the elastomer of the two-dimensional bone force sensor
based on E-type round diaphragm structure has been designed. The mechanical model
of the elastomer has been established, the stress and strain analytic solution of elastomer
under the action of axial pull pressure and radial shear force has been solved, and the
stress and strain analytic solutions under the action of resultant force also has been
obtained according to the superposition principle.
3) Established the finite element model of the sensor elastic body, respectively
analyzed the strain change of the elastic body under the action of axial pull pressure,
radial shear force and resultant force, and verified the correctness of the superposition
principle in the theoretical model according to the finite element solution results. Then
the obtained strain calculated results of the theoretical model and that of the finite
element model were compared to verify the correctness of the theoretical model, and
provided foundation for strain gauge patch position and bridging form as well.
4) Based on the theoretical model, the main structure dimensions--inner and outer
radius ratio and thickness of the elastic body-- has been optimized, the optimization
target of internal and external radius is the sensitivity of the sensor, and the optimization
goal of the thickness is linearity, thereby the major structural dimensions of the sensor
were obtained. According to the theory model and finite element model analysis results,
studied the strain gauge patch position and bridging form, through which completed the
decoupling of the two-dimensional bone force sensor.
5) Developed the calibration device of the sensor, which can realize the calibration
of the axial pull pressure and radial shear force; analyzed the traditional matrix
decoupling method. Proposed a new sensor static decoupling method based on the grey
system theory on the basis of the research and analysis of the traditional matrix
decoupling method.
6) Realized the calibration of the two-dimensional bone force sensor using the
designed calibration device and dynamic strain gauge, and obtained calibration data, the
two-dimensional bone force sensor was decoupled using the GM (0, 2) model. Based on
the result of calibration, the static performance index of the two-dimensional skeletal
force sensor was calculated. And the modal analysis of the sensor was done by finite
element method, figured out the working frequency range of the two-dimensional
skeleton force sensor. In vitro skeleton was investigated using the designed detection
and control system, and we got the expected results.
Keywords: two-dimensional bone force sensor, finite element method,
non-invasive sensing detection, decoupling, experimental
research
目 录
中文摘要
ABSTRACT
第一章 绪 论 ................................................................................................................ 1
§1.1 课题来源 ........................................................................................................... 1
§1.2 骨折愈合的生物力学机理与骨外固定器 ....................................................... 1
§1.2.1 骨折愈合的生物力学机理 ..................................................................... 1
§1.2.2 骨外固定器 ............................................................................................. 2
§1.3 骨骼创伤断面的应力测量 ............................................................................... 4
§1.4 骨折测力传感器 ............................................................................................... 8
§1.5 本学位论文的研究目的和意义 ...................................................................... 11
§1.6 主要研究内容 ................................................................................................. 12
第二章 骨骼应力无创传感检测与控制系统设计 ...................................................... 13
§2.1 引言 ................................................................................................................. 13
§2.2 骨骼应力无创传感检测与控制原理 ............................................................. 13
§2.3 骨骼应力无创传感检测系统设计 ................................................................. 14
§2.4 骨骼应力控制系统设计 ................................................................................. 15
§2.5 骨骼创伤断面的受力模型及其分析 ............................................................. 16
§2.5.1 轴向拉压力作用时骨骼的受力模型 ................................................... 16
§2.5.2 径向剪切力作用时骨骼的力学模型 .................................................. 19
§2.6 本章小结 ......................................................................................................... 24
第三章 传感器的设计及弹性体的理论模型 .............................................................. 26
§3.1 引言 ................................................................................................................ 26
§3.2 骨骼二维力传感器的弹性体设计 ................................................................. 26
§3.3 E 型弹性体的力学模型 .................................................................................. 28
§3.4 E 型弹性敏感元件的数学模型 ...................................................................... 28
§3.4.1 轴向拉压力
1
F
单独作用下 E型膜片的应力应变分析 ..................... 33
§3.4.2 径向剪切力
2
F
作用下
E
型膜片应力应变分析 ................................. 34
§3.5 叠加原理 ......................................................................................................... 38
§3.5.1 叠加原理的公式推导 ........................................................................... 39
§3.5.2 合力的应力应变解析解 ....................................................................... 40
§3.6 本章小结 ......................................................................................................... 41
第四章 传感器弹性体的有限元分析 .......................................................................... 42

§4.1 引言 ................................................................................................................. 42
§4.2 弹性体有限元模型的建立及网格划分 ......................................................... 42
§4.2.1 弹性体有限元模型的建立 ................................................................... 42
§4.2.2 弹性体有限元模型的网格划分 ........................................................... 44
§4.2.3 施加载荷与约束 ................................................................................... 45
§4.3 轴向拉压力作用下弹性体有限元分析 ......................................................... 45
§4.3.1 轴向拉压力作用下弹性体整体应变分析 ........................................... 45
§4.3.2 轴向拉压力作用下弹性体等半径处的应变分析 ............................... 46
§4.3.3 轴向力作用下弹性体直径方向上应变分析 ....................................... 47
§4.4 径向剪切力作用下弹性体有限元分析 ......................................................... 49
§4.4.1 径向剪切力作用下弹性体整体应变分析 ........................................... 49
§4.4.2 径向剪切力作用下弹性体等半径处应变分析 ................................... 50
§4.4.3 径向剪切力作用下弹性体直径方向上应变分析 ............................... 51
§4.5 合力作用下弹性体应变分析 ......................................................................... 53
§4.5.1 合力作用下弹性体整体应变分析 ....................................................... 53
§4.5.2 合力作用下弹性体等半径处应变分析 ............................................... 54
§4.5.3 合力作用下弹性体直径方向上应变分析 ........................................... 54
§4.5.4 叠加原理的验证 ................................................................................... 55
§4.6 理论模型和有限元模型的比较 ..................................................................... 56
§4.7 本章小结 ......................................................................................................... 58
第五章 弹性体尺寸的优化及传感器的贴片 .............................................................. 59
§5.1 引言 ................................................................................................................. 59
§5.2 传感器尺寸的优化 ......................................................................................... 60
§5.2.1 传感器材料的选用 .............................................................................. 60
§5.2.2 弹性体主要的结构尺寸优化 ............................................................... 61
§5.2.2.1 传感器内外圆半径比
ab
的优化 .................................................... 61
§5.2.2.2 传感器厚度 h的优化 ........................................................................ 63
§5.3 弹性体的理论应力应变 ................................................................................. 65
§5.3.1 轴向拉压力
1
F
作用下弹性体的应力变化 ........................................... 65
§5.3.2 径向剪切力
2
F
作用下弹性体的应力变化 ......................................... 67
§5.3.3 轴向拉压力
1
F
作用下弹性体的应变变化 .......................................... 69
§5.3.4 径向剪切力
2
F
单独作用下弹性体的应变变化 .................................. 70
§5.3.5 合力作用下弹性体的应力应变 ........................................................... 72
§5.4 传感器的贴片 ................................................................................................. 75
§5.4.1 应变片的应变电阻效应 ....................................................................... 75
§5.4.2 应变片贴片方式及组桥 ....................................................................... 76
§5.4.4 传感器的测量原理 ............................................................................... 78
§5.5 本章小结 ......................................................................................................... 78
第六章 传感器的标定及解耦 ...................................................................................... 80
§6.1 引言 ................................................................................................................. 80
§6.2 标定装置的研制 ............................................................................................. 81
§6.3 骨骼二维力传感器的标定步骤 ..................................................................... 82
§6.3.1 轴向拉压力标定步骤 ........................................................................... 83
§6.3.2 径向剪切力的标定步骤 ....................................................................... 84
§6.4 传感器的标定及解耦 ..................................................................................... 85
§6.4.1 传统的静态线性解耦 ........................................................................... 85
§6.4.2 灰色预测
(0, )GM N
模型 ...................................................................... 87
§6.5 本章小结 ......................................................................................................... 89
第七章 骨骼二维应力传感器的实验验证与分析 ...................................................... 90
§7.1 引言 ................................................................................................................. 90
§7.2 骨骼二维应力传感器的标定实验 ................................................................. 91
§7.2.1 标定系统结构组成 ............................................................................... 91
§7.2.2 实验步骤 ............................................................................................... 94
§7.2.3 特征参数的提取 ................................................................................... 95
§7.2.4 静态标定与解耦 ................................................................................. 101
§7.3 骨骼二维应力传感器静、动态特性研究 ................................................... 104
§7.3.1 骨骼二维应力传感器的静态特性 ..................................................... 104
§7.3.2 动态性能指标 ..................................................................................... 108
§7.4 检测与控制系统的实验研究 ........................................................................ 112
§7.5 本章小结 ........................................................................................................ 114
第八章 总结与展望 ..................................................................................................... 115
§8.1 论文总结 ........................................................................................................ 115
§8.2 主要创新点 .................................................................................................... 116
§8.3 研究展望 ........................................................................................................ 117
附录 ............................................................................................................................... 118
参考文献 ...................................................................................................................... 125
在读期间公开发表的论文和承担科研项目及取得成果 .......................................... 131
致 谢 .......................................................................................................................... 132

第一章 绪论
1
第一章 绪 论
§1.1 课题来源
本课题来源于国家自然科学基金项目:骨折愈合中创伤断面应力环境的实时
测控机理与实验研究(编号:50975179)
§1.2 骨折愈合的生物力学机理与骨外固定器
§
1.2.1 骨折愈合的生物力学机理
长期以来,骨折延迟愈合及骨不连一直是临床骨科面临的难题,减少延迟愈
合的发生,骨折就可按愈合规律正常连接。
应力可以调整骨的生长和吸收,一个低应力骨可变得脆弱,而一个超应力骨
同样也会变得脆弱,所以对骨的重建来说,存在着一个最佳应力范围[1~2]。实验和
临床观察表明,在机械应力和骨组织之间存在一种生理平衡。在一定的应力范围
内,骨质的增生和再吸收是相互平衡的。应力增加引起骨组织的加强,随应力的
减小发生再吸收现象,也就是说,骨组织的量与应力值成正比。对密质骨的 X光
检查,可证实这种说法。
骨是一种特殊的生物组织,始终进行着代谢活动[3]。从生物力学观点看,力学
状态控制骨的生长和吸收,骨折的愈合是一个连续不断的过程,是骨组织一面破
坏清除,一面新生修复的过程,也是从暂时性紧急连接到永久性坚固连接的过程。
骨折愈合的过程非常复杂,愈合时间受多种因素影响。不同部位的骨折其愈合时
间长短不一,骨折部位的创伤程度、治疗方法也直接影响愈合时间[4~6]。
目前,国内外普遍认可的骨折愈合的生物力学机理是 Wolff 定律和 Pauwels 理
论。
Wollf 于1884 年首先提出定性的骨再造理论,即活的骨按照所受的应力应变
而改变,人们称为 Wollf 定律,也称骨的功能适应性原理[7]。活体骨不断生长、加
强和再吸收过程,即骨组织的“重建”。活体骨重建过程的目标是:骨的结构适应
于其载荷环境的变化。骨修复过程中的生物力学机理是:充分利用功能情况下的
力学状态去控制骨修复,而不去干扰甚至破坏骨应承受的力学状态。
Pauwels 理论[9~11]:Pauwels(1973)得出,在一个最优值
s
时,骨组织的定常
微型无创骨折应力传感器的设计及实验研究
2
变化是平衡的,即增生的骨组织与再吸收的一样多。在容许的应力上限
o
和下限
u
内,当实际应力
i
大于最优值
s
时,增生占优势,而当实际应力
i
低于最优值
s
时,再吸收占优势。若实际应力
i
高于容许上限
o
时,骨头会受到破坏或被病
理性的再吸收所伤害,
i
低于下限
u
时,再吸收将停止。
综上所述,骨折治疗过程主要是骨桥搭接及塑型修复阶段,它是在一个开放
的反馈系统中,依照功能需要进行的所谓功能适应性修复。骨折断端的固定系统,
即骨折处的力学状态,将作为一个信息输入反馈系统,从而调整骨的修复,使断
端形成新的骨结构,接近正常功能状态。骨折在愈合的过程中应施加一定的力来
实现对骨骼断面进行刺激,基于此生物力学原理所研究出的骨外固定器可以实现
对骨骼创伤断面施加压力。
§
1.2.2 骨外固定器
固定器分为骨内固定器和骨外固定器,骨外固定器除了可以对断骨实现固定
以外,还可以对断骨施加一定的压力来促进断骨的生长[12]。骨外固定器技术治疗
骨折已有一百多年的历史了。随着骨外固定器的设计和应用技术的不断完善,当
今骨外固定不仅被公认为治疗骨折的标准方法之一,而且在骨缺损、骨延长以及
伴有感染可能的骨折治疗中骨外固定器发挥了骨内固定器无法替代的作用。
在骨折的近心与远心段经皮穿放钢针,再用一种金属或高强度非金属材料制
成的特殊装置把裸露在皮肤外的针端彼此连接、固定起来,这种应用固定、加压、
牵伸作用治疗骨折、矫治骨与关节矫形和进行肢体延长的技术,称为骨外固定技
术。这种技术中使用的特殊装置,称为骨外固定器[14]。
目前外固定器的种类繁多,根据固定方法可分为两类[14~16]:针式(pin)和环式
(ring)。针式外固定器根据其结构又分为:①单侧单平面构型、②单侧双平面构型、
③双侧单平面构型和④双侧双平面构型等四型。环式外固定器根据其结构又分为:
①半环四针型、②智能的半环四针型。
外固定器始于1840年,法国Malgaigne应用2枚大钉穿入胫骨骨折的两端,连接
到体外的—个金属环带上,以调控骨折移位。Malgaigne于1843年又设计了具有伸
缩功能的钳爪式髌骨外固定器。1897年,美国Parkhill设计了单侧外固定器,治疗
14例骨折,全部成功。
1902年著名比利时骨科医生Lambotte.设计了能调节的单侧
外固定器,受到高度评价。
1905~1937年间,
Boever,H.
Judet,
Lambotte,
Bonnel,
Challer,
Goosens,以及Jolt,
R.
Andersons等均对外固定器进行过有益的改进。
1938
年,Hoffmann设计了可在三个平面上进行调整且带有牵伸加压功能的外固定器,

摘要:
展开>>
收起<<
摘要长期以来,骨折延迟愈合与骨不连一直是临床骨科面临的难题,造成这一现象的根本原因是缺乏对活体骨骼创伤断面应力环境的实时检测与精确控制。骨折创伤断面的应力环境比较复杂,目前尚无有效的对骨折创伤断面的应力环境进行无创实时检测的原理与方法,更无法对其应力环境进行实时控制。临床上手术医生加压的不可知性和不可控性导致骨折愈合的速度及质量无法保证。基于以上研究背景,本学位论文依托于国家自然科学基金项目“骨折愈合中创伤断面应力环境的实时测控机理与实验研究”(编号:50975179),论文的主要工作是设计用于骨折创伤断面应力测量的微型二维应力传感器,并进行实验研究,论文的主要研究成果如下:1)对骨折愈合的生...
相关推荐
-
建筑工程投标文件范本-(格式)VIP免费

 2024-11-22 63
2024-11-22 63 -
疾病预防控制中心招标文件VIP免费
 2025-01-09 77
2025-01-09 77 -
体育健身中心施工招标文件VIP免费
 2025-01-09 58
2025-01-09 58 -
江西丰城电厂及广东从化事故案例分析VIP免费

 2025-03-04 13
2025-03-04 13 -
钢结构节点图集CAD版(可编辑)VIP免费

 2025-03-04 25
2025-03-04 25 -
[青岛]精品工程亮点做法图片集(130页)VIP免费
 2025-03-04 33
2025-03-04 33 -
外墙外保温工程技术规程JGJ144-2019VIP免费
 2025-03-04 17
2025-03-04 17 -
地铁停车场施工组织设计VIP免费
 2025-03-04 15
2025-03-04 15 -
项目建设安全管理流程图汇编VIP免费
 2025-03-04 46
2025-03-04 46 -
特训班学习心得VIP免费
 2025-03-04 15
2025-03-04 15
作者:高德中
分类:高等教育资料
价格:15积分
属性:138 页
大小:3.45MB
格式:PDF
时间:2024-11-19
相关内容
-
[青岛]精品工程亮点做法图片集(130页)
分类:行业资料
时间:2025-03-04
标签:建筑工程、精品工程、细部节点做法、亮点做法
格式:PPT
价格:5 积分
-
外墙外保温工程技术规程JGJ144-2019
分类:行业资料
时间:2025-03-04
标签:外墙保温、工程、规范
格式:ZIP
价格:2 积分
-
地铁停车场施工组织设计
分类:行业资料
时间:2025-03-04
标签:地铁、场段、施工组织设计
格式:DOCX
价格:3 积分
-
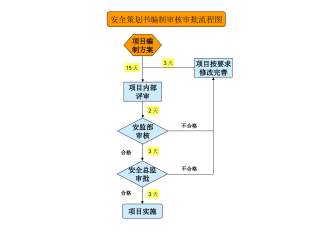
项目建设安全管理流程图汇编
分类:行业资料
时间:2025-03-04
标签:安全管理、流程图
格式:PPT
价格:1 积分
-
特训班学习心得
分类:行业资料
时间:2025-03-04
标签:拓展培训、结构化思考、培训、心得体会
格式:DOCX
价格:1 积分


