
平面三自由度并联机床运动学研究
VIP免费
平面三自由度并联机床运动学研究
中文摘要
并联机器人具有串联机器人不具有的优势,比如并联机器人具有刚度大、精
度高、承载能力强、动力性能好等一系列的优点,但是其工作空间小,不易于求
解,而串联机器人是开链的驱动形式,其刚度低,但工作空间大,因此,在性能
上串联机器人与并联机器人形成互补,并联机床是指采用并联机器人驱动刀具或
工件加工的数字控制机床.由于并联机床的驱动机构是并联机构,与传统机床相
比并联机床具有刚度重量比大、响应速度快、对环境适应性高、技术附加值高等
优点。
并联机床是一种全新理念的机床结构型式,在机械制造领域有着重要的应用
前景和开发价值。本文针对三自由度平面并联机床组成结构、工作空间的特性及
计算、奇异性和基于条件数的运动控制等方面进行了较系统的研究,本文所开展
的主要研究工作如下:
论文首先分析了平面三自由度并联机床的的分支运动链和机构型,研究了平
台位姿和支链关节参数的关系,以3-RRR支链为例,推导了平面并联机床位置正
反解的求解公式,利用VB编写运动学正逆解求解界面,并且通过正反解验证其正
确性,同时求解了正向雅克比矩阵和逆向雅克比矩阵,为奇异性的求解奠定基础
第二:以迭代搜索法分析了并联机床的可达工作空间、灵活工作空间以及定
姿态工作空间,建立一种参数化设计界面,以3-RRR为例,依据并联机器人的灵
巧度和可达工作空间的要求进行优化设计。
第三,论文研究了并联机床的工作空间的奇异性问题,讨论了寻找并联机构
奇异点的几种方法,针对平面并联机床, 根据Gosselin方法将其奇异性分为三类
给出相应位形的物理意义,基于雅克比矩阵的奇异性分解,以 3-RRR并联机构为
例,求解了平面并联机构的奇异点,通过CAD验证了该搜索方法的正确性。
在以上研究的基础上,基于雅可比矩阵条件数,建立3-RRR平面并联机床的控
制模型,以姿态角为优化目标,建立轨迹规划的算法,有效避开奇异点,把位置
轨迹离散化,进行位姿反解处理,求解相应的并联机床驱动电机参数,构建了实
验装置对研究结构进行了验证,为平面并联机床机构学的进一步研究奠定了一定
的理论和实践基础。
关键词:并联机床 运动学 工作空间 灵活性 奇异性 轨迹规划
ABSTRACT
Parallel manipulator have many advantages that serial manipulator does not have
, s u c h a s P a r a l l e l m a n i p u l a t o r i s c h a r a c t e r i s t i c o f h i g h
s t i f f n e s s、h i g h a c c u r a c y、high load-carrying capacity、good dynamic properties
etc, but parallel manipulator have some disadvantages, such as small work space, and
i t i s d i f f i c u l t t o a n a l y s i s i t s w o r k s p a c e , S o p a r a l l e l m a n i p u l a t o r a n d s e r i e s o n e a r e
complementary to each other. The parallel machine tool is numerical control machine
w h i c h d r i v e m a c h i n e s t r u c t u r e i s p a r a l l e l m e c h a n i s m . b e c a u s e o f t h e p a r a l l e l
m e c h a n i s m , C o m p a r e d t o t r a d i t i o n a l m a c h i n e t o o l , t h e p a r a l l e l m a c h i n e t o o l h a v e
m a n y a d v a n t a g e s . s u c h a s h i g h s t i f f n e s s v e r s u s w e i g h r a t i o、h i g h r e s p o n s e
speed、easy to suit to environment、high added value because of technology.
Parallel machine tools is machine of new concept and there is wide application
foreground as well as developing value in industry areas. Parallel manipulator
formation structure、w o r k s p a c e p r o p e r t y a n d i t s c a l c u l a t i o n 、s i n g u l a r i t y a n d
trajectory planning based on condition index is studied in this thesis. The following is
research we carried out.
Firstly, study the configuration analysis and branching kinematics chains of 3-
R R R p l a n a r P a r a l l e l m a n i p u l a t o r , t h e r e l a t i o n s o f t h e p l a t f o r m p o s e a n d t h e
parameters of branched-chain joint is studied. And take 3-RRR for example, analyze
t h e d i r e c t a n d i n v e r s e s o l u t i o n s o f a p a r a l l e l m a n i p u l a t o r , d e d u c e t h e f o r m u l a f o r
solving forward and inverse kinematics, and the interface of forward and inverse
k i n e m a t i c s s o l u t i o n o f 3 - R R R i s b u i l t , t h e n v e r i f y i t s c o r r e c t n e s s b y C A D
.at the same time . I solve the direct and inverse Jacobian matrix, make the foundation
for trajectory planning based on condition index.
S e c o n d l y, g i v e d e f i n i t i o n o f t h e r e a c h a b l e w o r k s p a c e . f l e x i b l e w o r k s p a c e a n d
o r i e n t a t i o n w o r k s p a c e . a n d s o l v e t h e m b y i t e r a t i v e s e a r c h . T a k e 3 - R R R p l a n a r
parallel manipulators as a case. To meet the given dexterity and reachable workspace,
t h e p a r a m e t r i c o p t i m a l d e s i g n i n t e r f a c e i s b u i l t . M a k e a f a v o r a b l e i n t e r f a c e f o r
parallel manipulators.
T h i r d l y, T h e s i n g u l a r i t y o f p a r a l l e l m a n i p u l a t o r ( P M ) i s s t u d y i s t h i s t h e s i s . I
study some method to find the singularity of the PM. Classify the singularity into
three types based on Gosselin theory.,and give the physical meaning of the relevant
configuration, at last, I solve the singularity of the PM based on the Jacobian matrix
singular value decomposition,the solve interface is built based on VB, then verify
its correctness by CAD.
Based on the research above, I built the control system of 3-RRR planar parallel
m a n i p u l a t o r s . T a k e t h e o r i e n t a t i o n o f t h e d y n a m i c p l a t f o r m a s o p t i m a l t a r g e t , I
establish the trajectory planning algorithm to avoid the singularity validly. The motion
trajectory was discreted to obtain its inverse kinematics solution from VB, generate
t h e i n p u t m o t i o n d a t a , t r a n s m i t t h e m o t i o n d a t a t o M C U v i a R S 2 3 2 . T h e a b o v e
approach is demonstrated on an experimental prototype. Establish the foundation for
parallel manipulator design and application.
Key Word: Parallel Machine Tools ,Kinematics, Workspace, Flexibility,
Singularity, trajectory planning.
目 录
中文摘要
ABSTRACT
第一章 绪 论...............................................................................................................1
§1.1 并联机床的来源及发展...................................................................................1
§1.1.1
并联机床的来源
.........................................................................................1
§1.1.2
并联机床的发展及研究现状
......................................................................2
§1.2并联机床的研究方向........................................................................................5
§1.3少自由度并联机器人发展来源........................................................................7
§1.4本章总结............................................................................................................7
第二章 平面三自由度并联机床的工作空间.............................................................8
§ 2.1平面三自由度并联机床的构型分析及类型...................................................8
§ 2.1.1
分支运动链及机构的型
.............................................................................8
§ 2.1.2
机构的组成元素与自由度计算
...............................................................10
§ 2.2 并联机构的工作空间....................................................................................10
§2.2.1
并联机床工作空间研究方法
....................................................................11
§2.2.2
坐标系的建立及搜索方法
........................................................................12
§2.2.3
搜索的基本步骤
........................................................................................13
§2.2.4
定姿态的工作空间
....................................................................................14
§2.2.5
一定姿态角变化范围下的工作空间
........................................................15
§2.2.6
灵活工作空间
............................................................................................16
§2.2.7
基于
VB
建立参数化输出界面
...................................................................16
§2.3本章总结..........................................................................................................18
第三章 平面三自由度并联机床位置分析...............................................................19
§3.1正解坐标系的建立及求解..............................................................................19
§3.1.1
正解坐标系的建立
....................................................................................19
§3.1.2
运动学正解求解
.......................................................................................21
§3.1.3
机床位置求解的迭代搜索法
....................................................................23
§3.2位置逆解..........................................................................................................26
§3.2.1
坐标系的建立及求解
...............................................................................26
§3.2.2 3-RRR
逆解求解的参数化界面
...............................................................28
§3.3本章小结..........................................................................................................29
第四章 平面三自由度并联机床的奇异性...............................................................30
§4.1.雅克比矩阵.....................................................................................................30
§4.1.1
雅克比矩阵综述及求解坐标系的建立
....................................................30
§4.1.2.
雅可比矩阵条件数及其在轨迹规划中的应用
.......................................32
§4.2.矩阵的奇异性分解QR算法和其VISUAL BASIC编程实现............................34
§4.2.1
矩阵的
Givens
旋转
.....................................................................................34
§4.2.2
矩阵的
Visual Basic
编程实现及过程思想
................................................35
§4.3奇异位形研究..................................................................................................35
§4.3.1
奇异位形的定义
........................................................................................36
§4.3.2
奇异构形分类
............................................................................................36
§4.3.3
奇异构形运动学原理
................................................................................37
§4.4奇异位形的主要研究方法..............................................................................37
§4.4.1
基于雅克比矩阵的奇异点求解
................................................................38
§4.4.2
基于条件数的奇异点的求解
....................................................................40
§4.5奇异性的规避..................................................................................................42
§4.6本章小结..........................................................................................................43
第五章 平面三自由平面并联机床精度分析...........................................................45
§5.1 3-RRR精度机构坐标系..................................................................................45
§5.2 3-RRR精度模型的求解..................................................................................46
§5.3控制并联机构的误差的方法:......................................................................48
§5.4本章总结..........................................................................................................48
第六章 平面三自由度并联机器人实验研究...........................................................49
§6.1实验系统硬件组成..........................................................................................49
§6.1.1
步进电机的工作原理
................................................................................49
§6.1.2
实物制作中单片机工作原理及系统
.......................................................51
§6. 2控制软件及通讯.............................................................................................52
§6.2.1 MSComm
控件处理通讯的方式
...............................................................52
§6.2.2 MSComm
控件常用属性
..........................................................................52
§6. 3 单片机通信和多机联动控制........................................................................55
§6.4本章总结..........................................................................................................57
第七章 论文总结与展望...........................................................................................58
§7.1研究工作总结..................................................................................................58
§7.2展望..................................................................................................................58
附录............................................................................................................................60
参考文献....................................................................................................................64

第一章 绪 论
第一章 绪 论
§1.1 并联机床的来源及发展
机械的使用提高人类改造自然的能力,同时推动着人类社会的进步和文明的
发展。制造和被制造的机械核心是机构,所以机构学的研究是制造业的基础,是
现代机械产品发明创造的核心,同时机械制造业与国民经济息息相关,因此机械
制造业也受到世界各国的重视和得到大力发展 。近年来,随着经济全球化的不
断加快,对机械制造业的要求也越来越高,为了满足生产多样性和生产效率,满
足市场灵活多变的要求,研究适合高速、超高速,更智能化的机床结构、制造装
备和系统等非常有必要,并联机床以其全新的结构形式,打破了传统思维,很好
的满足市场的需求,因此,并联机床是是时代发展的要求,是科技进步的体现。
§1.1.1 并联机床的来源
传统机床[1]一般是由床身、立柱、主轴箱和工作台等部件串联而成的非对称
“C”型结构,,各个轴的运动相互独立,结构一般为开链式,采用笛卡尔坐标或
极坐标形式框架,尽管这种“C”型布局具有工作空间大、灵活性好,各轴独立
运动以及易于标定等优点,但却存在如下缺点和不足:
1.非对称性的机床结构布局导致其结构受力与热变形不均匀。
2.机床结构件不但承受拉压载荷,而且还承受弯扭载荷,因此为了保证刚
度,通常需要笨重的结构支撑件和运动部件,使得机床的重量大,而且移动部件
惯性较大,从而限制机床加工时的速度和加速度。
3.由于串联机构的误差是各个环节的误差的积累和放大,误差大且精度低
4.结构复杂、部件众多,直接影响到系统的传动性能和可靠性,生产周期
长,技术附加值低
5.虽然串联机构的工作空间大,但其运动低[2],不能用于微动控制。
怎样把将机器人的灵活性好、工作区域大与传统机床精度、刚性高的优点结
合在一起,成为机床研究的热点问题,在过去的20年里,人们一直将并联机器人
运用于并联机床(PKM)的开发和设计中,并联机器人技术是指通过3个或3个以
上伸缩机构联接定平台和动平台,实现动平台的运动,必要时,在动平台的末端
再串联两个旋转轴,以增加机床的工作空间和自由度。这种结构的刚性大、精度
高,而且还能保证结构的灵活性和工作区域。自并联机床首次在1994年美国芝加
哥机床展上面世即被称为“机床行业的革命”,越来越多的科研单位和生产厂商
加大并联机构的研究和制造,并引发并联机构的研究高潮,与传统机床相比,并
联机床具有如下优点[3-4]:
1.并联机床机构由多根杆件支撑,与传统串联悬臂机床相比,刚度大、结
构稳定。
2.并联机床中的变形构件主要以承受拉压力为主,刚度大,所以并联机床
在相同的重量情况下,较传统机床有更大的承载能力,机床具有较高的刚度重量
比。
1
平面三自由度并联机床运动学研究
3.并联机床机构的执行构件的误差不是各个环节的误差积累和放大,因此
更容易获得较高的精度;
4.并联机床机构的执行机构运动灵活提高,易实现多自由度联动,从而更
易于实现空间曲面的加工;
5.并联机床结构简单,零件总数少,成本低,生产周期短,技术附加值高
6.并联机床移动部件质量很小,响应速度较快,动态性能好,更适于高速
度加工;
7.并联机床的模块化程度高,易于重构;
8.并联机床有很高的精度和分辨率,可以用于微动控制
并联机床是机器人技术与机床技术相结合产生的高科技产品,由于并联机床
响应快,从而更容易实现高速、超高速加工,能补充传统机床中的不足,在机构
上完全打破了传统机床结构的概念,抛弃了固定导轨的刀具导向方式,采用了多
杆并联机构虚拟轴驱动,零件少但数学复杂,整个平台的运动学和动力学涉及
到比较多的的数学建模和运算,而串联机构机床,数学模型较简单而机构复杂
零件多的机床,因此虚拟轴并联机床是一种知识密集型机构,适合高校研究生课
题,并联机床采用了封闭支链的结构,其刚度重量比高于传统的数控机床,提
高了机床的刚度,使零件的加工精度和加工质量都有较大的改进,在实际应用中
把并联和串联组合在一起形成混联式数控机床,这种机床不但具有并联机床的
优点,而且工作空间大,在实际生产中更具实用价值,因此研究并联机床有很大
的现实意义和理论深度。
§1.1.2并联机床的发展及研究现状
并联机器人的研究始于1965年Stewart[5]提出著名的Stewart平台机构,在此基
础之上开始了并联机构的虚拟机床研究,开始人们只是对这种机构进行理论分析
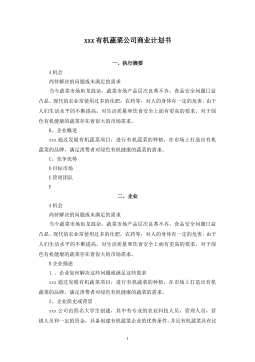
直到在1994年美国芝加哥国际机床博览会,美国的Giddings & Lewis公司展示历
时6年才研制成功的并联机床VARIAX,(图1-1)在当时引起极大的轰动,被誉
为“机床行业的革命”。VARIAX是以Stewart平台为基础的五坐标立式加工中心
同时靠万向铰固定在下平台上的六根由伺服电动机驱动的伸缩杆也被称为“6条
腿 (Hexapod)”,丝杆的螺母通过万向铰支承着上平台,根据加工的工艺,以杆的
伸缩使带有主轴部件的上平台完成零件的加工。
2

第一章 绪 论
图1-1美国芝加哥机床展上推出的并联机床“VARIAX”
1 9 9 5年,美 国 的另一家机 床 公 司I n g e r s o l l M i l l i n g M a c h i n e R o c k f o r d
公司研制成功了并联机床加工中心OHM,该机床除了能实现铣削加工外,还能
作为综合测量机和轻型压床使用,其他国家如:瑞士、瑞典、日本、俄罗斯、德
国等纷纷开发出自己的并联机床。在初期,并联机床主要是六自由度的结构,逐
渐有其他自由度的并联机床,称其为少自由度的并联机床,如图(1-2)为一少
自Delta机器人,同时混联机床也出现。
中国的并联机床研究开发虽然起步较晚,但是对并联机床的研究非常的重视
特别是在并联机构的基础理论研究方面,对虚拟轴机床以及多个相关领域进行了
深入研究,成果显著。国内最早开始进行虚拟轴机床研究的单位清华大学,大连
机床集团与清华大学合作开发的混联机床dcb510如图1-2所示,其加工精度为15
微米,1997年清华与天津大学合作,共同开发出中国第一台大型镗铣类虚拟轴机
床原型样机VAMT1Y,在虚拟轴机床设计理论与样机建造等方面有很大的突破性进
展。
3

摘要:
展开>>
收起<<
平面三自由度并联机床运动学研究中文摘要并联机器人具有串联机器人不具有的优势,比如并联机器人具有刚度大、精度高、承载能力强、动力性能好等一系列的优点,但是其工作空间小,不易于求解,而串联机器人是开链的驱动形式,其刚度低,但工作空间大,因此,在性能上串联机器人与并联机器人形成互补,并联机床是指采用并联机器人驱动刀具或工件加工的数字控制机床.由于并联机床的驱动机构是并联机构,与传统机床相比并联机床具有刚度重量比大、响应速度快、对环境适应性高、技术附加值高等优点。并联机床是一种全新理念的机床结构型式,在机械制造领域有着重要的应用前景和开发价值。本文针对三自由度平面并联机床组成结构、工作空间的特性及计算...
相关推荐
-
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费

 2024-10-14 48
2024-10-14 48 -
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 64
2024-10-14 64 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(原卷版)VIP免费
 2024-10-14 43
2024-10-14 43 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(解析版)VIP免费
 2024-10-14 32
2024-10-14 32 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(原卷版)VIP免费
 2024-10-14 66
2024-10-14 66 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)VIP免费
 2024-10-14 50
2024-10-14 50 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)VIP免费
 2024-10-14 48
2024-10-14 48 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)VIP免费
 2024-10-14 52
2024-10-14 52 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费
 2024-10-14 51
2024-10-14 51 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 51
2024-10-14 51
作者:高德中
分类:高等教育资料
价格:15积分
属性:69 页
大小:5.05MB
格式:DOC
时间:2024-11-19
相关内容
-
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分


