
平面并联机床工作空间及灵活性研究
VIP免费
平面并联机床工作空间及灵活性研究
摘 要
并联机床是一种全新理念的机床型式,由于结构简单、控制方便和制造成本低
廉等原因,在各个领域有着重要的应用前景和开发价值。本文针对平面并联机床结
构,对其组成结构、工作空间的特性及计算、奇异性和运动仿真等方面进行了较系
统的研究。本文所开展的主要研究工作如下:
论文首先分析了平面三自由度并联机床的的分支运动链和机构型,研究了平台
位姿和支链关节参数的关系。以RRR支链为例,推导了平面并联机床位置正反解的
求解公式,利用VB用迭代搜索法编写运动学正逆解程序,并用画图法验证其正确性
然后详细分析了并联机床的可达工作空间、灵活工作空间以及定姿态工作空间
的定义和特点。用子工作空间交集法求出6种三自由度并联机床的可达工作空间;
以RRR支链为例,分析了平面并联机床支链几何参数对可达工作空间的影响。提出
了平面并联机床工作空间的迭代搜索法,编写相关求解灵活工作空间和定姿态工作
空间的程序。
其次,论文研究了并联机床的工作空间的奇异性问题,讨论了寻找并联机构奇
异性的几种方法。针对平面并联机床, 根据Gosselin方法找出了RRR并联机构的奇
异点,将其奇异性分为三类,给出相应位形的物理意义。并简单分析了规避奇异位
置的方法。
在以上研究的基础上,使用Pro/Engineer软件对RRR平面并联机床进行运动学
仿真。首先对并联机床主要零部件三维建模,在Assembly模块中虚拟装配并干涉检
验。在MECHANISM模块下进行运动学分析得到在动平台匀速运动时三个主动杆
的角位移、角速度和角加速度。研究了机构几何参数对机床运动学性能的影响。为
平面并联机床机构学的进一步研究奠定了一定的理论基础。
关键词: 运动学 工作空间 灵活性 奇异性 并联机床

ABSTRACT
Pa ra l l e l ma c h i n e to ol s i s ma c h i n e o f n ew c on c e p t a nd t h e r e i s w id e a p p l i cati on
foreground as well as developing value in many areas due to its simpleness in
s t r u c t u r e,f e a s i b i l i t y i n c o n t r o l a n d c h e a p d e v e l o p m e n t c o s t,a s w e l l . k i n e m a t i c s ,
workspace, singularity and simulation of a plane parallel manipulator is studied in this
thesis.The following is research we carried out.
F i r s t , i n t r o d u c t t h e c o n f i g u r a t i o n a n a l y s i s a n d br a n c h i n g k i n e m a t i c c h a i n s o f 3 -
DOF planar Parallel manipulator,the relations of the platform pose and the parameters
of branched-chain joint is studied.And then RRR for example, analyze the forward and
inverse solutions of a parallel manipulator, deduce the formula for solving forward and
inverse , write interface for solving forward and inverse with iterative search m ethod
in VB , and verify its correctness by drawing method .
T h e n , d e t a i l e d a n a l y s i s t h e de f i n i t i o n a n d c h a r a c t e r i s t i c s o f t h e r e a c h a b l e
w o r k s p a c e , f l e x i b l e w o r k s p a c e a n d or i e n t a t i o n wo r k s p a c e . F i n d o u t t h e r e a c h a b l e
w o r k s p a c e o f s i x k i n d s o f 3 - D O F p a r a l l e l m a c h i n e t o o l w i t h t h e s u b - w o r k s p a c e
intersection method . To RRR branched-chain, for example, analysis of the impact of
the geometric parameters of planar parallel machine tool branched-chain to reachable
w o r k s p a c e . a s a n e x a m p l e o f R R R p a r a l l e l m a n i p u l a t o r. P r o p o s e a n i t e r a t i v e s e a r c h
method for planar parallel machine tool workspace Write interface for solving flexible
workspace and orientation workspace with the search method in VB.
Secondly, discuss the methods for singularity of the parallel machine tools. Find
t h e s i n g u l a r p o i n t o f t h e R R R pa r a l l e l ma c h i n e to o l s a c c o r d i n g t o G o s s e l i n
m e t h o d . Ca t e g o ry i t i n t o t h r e e an d g i v e t h e p h y s i c a l m e a n i n g o f t h e a p p r o p r i a t e
configuration, then briefly introduct a method to circumvent the singularity.
B a s e d on th e r esearch a b o ve , s i m u l a t e k i n e m a t i c s i n P r o / E n g i n e e r
s o f t w a r e. F i r s t o f a l l , b u i l d m o d el o f t h e m a j o r c o m p o n e n t s , v i r t u a l a s s e m b l y a n d
interfere test in the Assembly module. Then kinematic analysis in the MECHANISM
module.Get the angular displacement, angular velocity and angular acceleration of three
ac t i v e r o d s . An a l y s i s o f t h e i m p a c t o f t h e p a r a m e t e r s o f b r a n c h e d - c h a i n t o
kinem atics. Lai d a theo ret ical found ation for further study of plana r parallel machi ne
tool .
Key Word:Kinematics,Workspace,Flexibility,Singularity,Parallel Machine
Tools
目 录
摘 要
ABSTRACT
第一章 绪 论................................................................................................................1
§1.1并联机床及其发展..........................................................................................1
§ 1.1.1并联机床及其特点................................................................................1
§ 1.1.2并联机床发展概述................................................................................2
§1.1.3并联机床的研究方向.............................................................................5
§1.2 少自由度并联机器人.....................................................................................6
§1.3并联机床工作空间研究现状..........................................................................8
§1.4本论文主要的研究内容..................................................................................9
第二章 平面三自由度并联机床的运动学研究..........................................................11
§2.1 平面三自由度并联机床的构型分析...........................................................11
§ 2.1.1分支运动链及机构的型......................................................................11
§ 2.1.2机构的组成元素与自由度..................................................................13
§2.2 三自由度并联机床的机构位姿分析...........................................................14
§2.3 3-DOF平面并联机床运动学方程...............................................................16
§2.3.1 运动学正解..........................................................................................16
§ 2.3.2运动学逆解..........................................................................................18
§2.4 机床位置求解的迭代搜索法.......................................................................20
§2.5 本章小结.......................................................................................................25
第三章 平面并联机床的工作空间分析......................................................................26
§3.1 概述...............................................................................................................26
§3.2 工作空间的描述与评价...............................................................................26
§3.3 机床工作空间分析.......................................................................................27
§ 3.3.1平面并联机床的可达工作空间..........................................................27
§ 3.3.2平面并联机床的灵活工作空间..........................................................32
§ 3.3.3定姿态工作空间..................................................................................34
§3.4 本章小结.......................................................................................................36
第四章 平面并联机床的奇异性分析..........................................................................37
§4.1 奇异位形的基本定义...................................................................................37
§ 4.1.1奇异构形分类......................................................................................37
§ 4.1.2奇异构形运动学原理..........................................................................38
§4.2 奇异位形的主要研究方法...........................................................................38
§4.3 Gosselin方法.................................................................................................40
§4.4 奇异性的规避...............................................................................................42
§ 4.4.1构型分岔现象......................................................................................43
§ 4.4.2通过奇异位置的构型模式..................................................................43
§4.5 本章小结.......................................................................................................44
第五章 平面并联机床运动仿真..................................................................................45
§5.1 并联机床主要零部件的三维建模...............................................................45
§5.2 机构虚拟装配及干涉检验...........................................................................46
§5.3 机构运动仿真分析.......................................................................................47
§5.4 本章小结.......................................................................................................51
第六章 论文总结与展望..............................................................................................52
§6.1 总结...............................................................................................................52
§6.2 有待进一步研究的工作...............................................................................52

第一章 绪 论
第一章 绪 论
§1.1并联机床及其发展
§ 1.1.1并联机床及其特点
在机械制造系统的发展历程中,每一次金属加工机床的技术更新与改进,都对
制造技术和生产带来飞跃性的进步,提高了机械制造业的生产能力和产品质量,降
低生产成本和明显地缩短了生产周期。
传统机床一般均是由床身、立柱、主轴箱和工作台等部件串联而成的非对称
“C”型布局。尽管这种C”型布局具有灵活性好,作业范围大等优点,但却存在
如下固有缺陷:
1.非对称性的机床结构布局导致受力与热变形不均匀。
2.机床结构件不但承受拉压载荷,而且还承受弯扭载荷。因此为了保证刚度
粗笨的结构支撑件和运动部件通常需要建造。材料和能源不仅需要耗费,而且也制
约了机床动态性能的提高。
3.刀具与工件之间的相对运动误差在各运动坐标中线性累加。
4.结构复杂、部件众多,直接影响到系统的可靠性。
为了提高对生产环境的适应性, 满足市场需求的快速多变, 多功能的制造装备与
系统一直在积极探索和研制, 90年代中期问世的并联机床在机床结构技术上的取得
突破性进展。并联机床实质上是机床技术与机器人技术结合的产物, 其原型是并联
平台式机器人。因此并联机床是机械制造、计算机软硬技术、数控技术、空间机构
学和CAD/CAM技术高度结合的高新科技产品。它克服了传统串联机床机构刀具作
业自由度偏低、刀具只能沿固定导轨进给和机动性不够等固有缺陷,可实现多坐标
联动数控加工、装配和测量等多种功能,更能满足复杂特种零件的加工。自其首
次在1994年美国芝加哥机床展上面世即被誉为“21世纪的机床”,成为机床家族
中最有生命力的新成员。
整体而言,传统的串联机床,是属于数学模型简单而机构复杂的机床,并联
机床机构则机构相对简单而数学模型复杂,整个平台的运动牵涉到庞大的数学运
算,因此虚拟轴并联机床是一种知识密集型机构。这种新型机床抛弃了固定导轨
的刀具导向方式,完全打破了传统机床结构的概念,采用了多杆并联机构驱动,
提高了机床的刚度,使加工精度和加工质量都有极大的改进。
与传统串联机床相比,并联机床具有如下优点[1-3]:
1.并联机床机构的执行构件的误差不是简单的线性累加,因此工作头更容易
获得较高的精度;
2.并联机床机构的执行机构运动灵活提高,易实现多自由度联动,从而更易
于实现空间曲面的加工;
3.并联机床反解容易,轨迹规划相对简单,易于控制;
4.并联机床结构简单,零件总数少,成本低;
1

平面并联机床工作空间及灵活性研究
5.并联机床中的变形构件主要以承受拉压力为主,而且由于闭环力流封闭,
机床具有较高的刚度重量比;
6.并联机床移动部件质量很小,响应速度较快,动态性能好,更适于高速度
加工;
7.并联机床的模块化程度高,易于重构;
另外,由于其进给速度的提高,从而使高速、超高速加工更容易实现。因此受
到机械制造业的广泛关注。并联机床既可以单机使用,也可以配置成生产线。因此
并联机床是新一代机床结构的重要发展方向。
§ 1.1.2并联机床发展概述
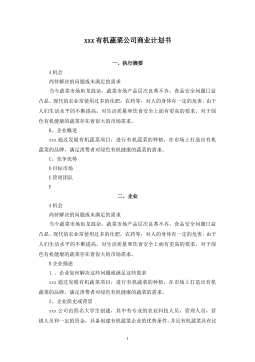
图1-1 Variax型加工中心
1994年,在美国芝加哥国际机床展览会上,美国Giddings & Lewis公司首次展
出了一台以Stewart平台为基础的五坐标立式加工中心Variax型并联运动机床,引起
轰动[4-5]。标志着机床设计开始采用并联机构,是机床结构改革的重大里程碑,其
结构如图1-1所示。借助万向铰固定在下平台上的六根由伺服电动机驱动的伸缩杆
也被称为“6条腿 (Hexapod)”,丝杆的螺母通过万向铰支承着上平台。带有主轴
部件的上平台完成加工零件所需的运动是由杆件长度的伸缩完成的。
由欧共体Esprit高科技研究计划资助[7]的德国Mikromat公司研制的6X Hexa立式
加工中心,该机床的外观如图1-3所示。
2

第一章 绪 论
图1-2 6X Hexa型并联运动机床
从图中可见,为方便装卸工件,工作台在机床的底座上可前后移动。用于支承
并联机构的3根立柱在底座上按照120°分布。该机床可以实现5坐标高速铣削,主要
用于模具加工,加工精度可达0.01~0.02mm,加工效率明显提高、表面质量显著
改善,也延长刀具寿命。
德国Reichenbacher公司是一家生产木材加工数控铣床的小公司。最近推出
Pegasus型木材加工中心[7-9]采用了并联机构,其外观如图1-4所示。该机床的结构特
点是采用三组固定杆长的、两端有万向铰链的杆系,借助铰链将杆系分别与三块移
动滑板和动平台连接。三块滑板有各自的直线电动机初级绕组,但它们共用一个固
定在机床横梁上的次级。改变三个移动滑板相对主轴刀头点垂直截面的距离,就可
以实现刀头点在X、Y、Z坐标方向的运动。
图1-3 Pegasus型木材加工中心
中国的并联机床研究开发虽然起步较晚,但成果显著。大连机床集团与清华大
学合作开发的混联机床dcb510如图1-5所示。国内最早开始进行虚拟轴机床研究的
3

摘要:
展开>>
收起<<
平面并联机床工作空间及灵活性研究摘要并联机床是一种全新理念的机床型式,由于结构简单、控制方便和制造成本低廉等原因,在各个领域有着重要的应用前景和开发价值。本文针对平面并联机床结构,对其组成结构、工作空间的特性及计算、奇异性和运动仿真等方面进行了较系统的研究。本文所开展的主要研究工作如下:论文首先分析了平面三自由度并联机床的的分支运动链和机构型,研究了平台位姿和支链关节参数的关系。以RRR支链为例,推导了平面并联机床位置正反解的求解公式,利用VB用迭代搜索法编写运动学正逆解程序,并用画图法验证其正确性然后详细分析了并联机床的可达工作空间、灵活工作空间以及定姿态工作空间的定义和特点。用子工作空间交...
相关推荐
-
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费

 2024-10-14 44
2024-10-14 44 -
七年级数学下册(易错30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 61
2024-10-14 61 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(原卷版)VIP免费
 2024-10-14 41
2024-10-14 41 -
七年级数学下册(易错30题专练)(沪教版)-第12章 实数(解析版)VIP免费
 2024-10-14 31
2024-10-14 31 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(原卷版)VIP免费
 2024-10-14 58
2024-10-14 58 -
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)VIP免费
 2024-10-14 47
2024-10-14 47 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)VIP免费
 2024-10-14 44
2024-10-14 44 -
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)VIP免费
 2024-10-14 50
2024-10-14 50 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)VIP免费
 2024-10-14 48
2024-10-14 48 -
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)VIP免费
 2024-10-14 48
2024-10-14 48
作者:高德中
分类:高等教育资料
价格:15积分
属性:61 页
大小:6.49MB
格式:DOC
时间:2024-11-19
相关内容
-
七年级数学下册(压轴30题专练)(沪教版)-第15章平面直角坐标系(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第14章三角形(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(原卷版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分
-
七年级数学下册(压轴30题专练)(沪教版)-第13章 相交线 平行线(解析版)
分类:中小学教育资料
时间:2024-10-14
标签:无
格式:DOCX
价格:15 积分


